

Учебник по программированию роботов-собак: Petoi Bittle vs Gummy Bear на Хэллоуин
25 ноября 2022 г.Узнайте, как нарядить Биттла и запрограммировать его на воспроизведение хэллоуинских комиксов

История
Привет!
Прошло два года с тех пор, как мы выпустили Маленькую роботизированную собаку – программируемый набор роботов. . К празднованию Хеллоуина я вместе с Биттл снял хоррор-комикс. Вы можете просмотреть окончательный вариант и прочитать следующее руководство, чтобы ваши роботы Petoi играли как профессионалы.
https://www.youtube.com/watch?v=53airP7kKd4?embedable=true
Идея
Идея взята из множества милых видеороликов о животных, в которых собак и кошек одевают в костюмы.
У меня под рукой есть оба роботы Bittledog и Nybblecat. Поскольку строение их ног очень похоже на настоящее, думаю, было бы забавно их нарядить. Тем не менее, длина тела роботов составляет около 15 см, поэтому я многое подкорректировал, чтобы подогнать их под самые крошечные костюмы настоящих питомцев.

Оборудование
Я уже печатал голову тыквенной кошки, но исходный файл дизайна Thingiverse кажется удаленным. Вы можете найти несколько вариантов или создать свой собственный.
Я заменил некоторые ультразвуковые датчики светодиодами RGB. В каждой колонке установлено по три RGB-светодиода WS2812. Их можно запрограммировать как мигающие глаза с помощью библиотеки Adafruit NeoPixel.
Я вставил ультразвуковой датчик в головку тыквы. Я также приклеил небольшой пластиковый блок между тыквой и головой Биттла, чтобы поднять тыкву над высоким воротником.

Теперь главный герой готов к работе.

Сюжет
Мне нужно добавить несколько драматических сюжетных линий, чтобы сделать простые движения менее скучными. У меня есть несколько анатомических моделей для справки при разработке бионических роботов. Они идеально подходят к теме Хэллоуина.

Они также выглядят довольно жутко. Убийца (Биттл) должен быть потрясен, столкнувшись со своей могущественной жертвой. Я приклеил к руке убийцы небольшой магнит, чтобы кинжал можно было отсоединить. Сила магнита регулируется тонким слоем горячего клея, так что кинжал падает при умеренном ударе.

Я также буду использовать встроенные функции "обход" и "сальто назад", чтобы заставить убийцу наблюдать за окружением и отпрыгивать назад, когда он шокирован.
Программное обеспечение
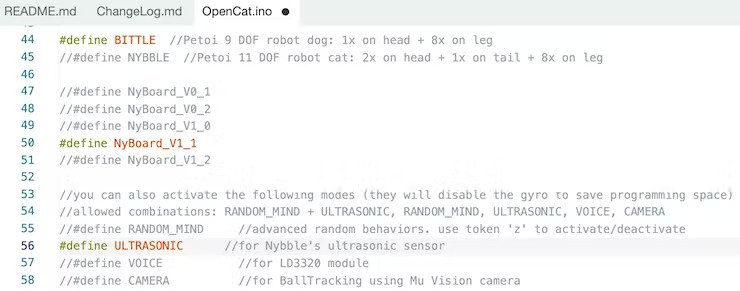
За последние годы я оптимизировал программное обеспечение OpenCat, чтобы сделать его удобным для пользователя. Мне нужно только раскомментировать определение макроса, чтобы активировать светодиоды на ультразвуковом датчике.
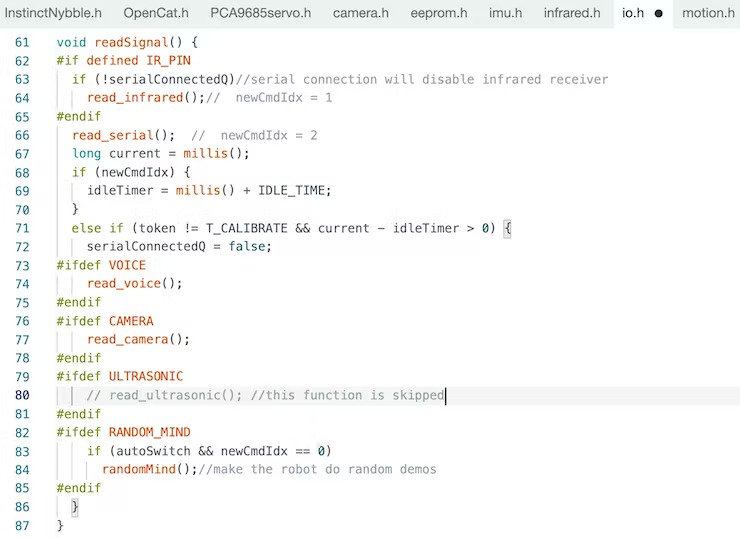
Мне нужно отключить функцию измерения расстояния, чтобы остановить автоматические реакции робота.
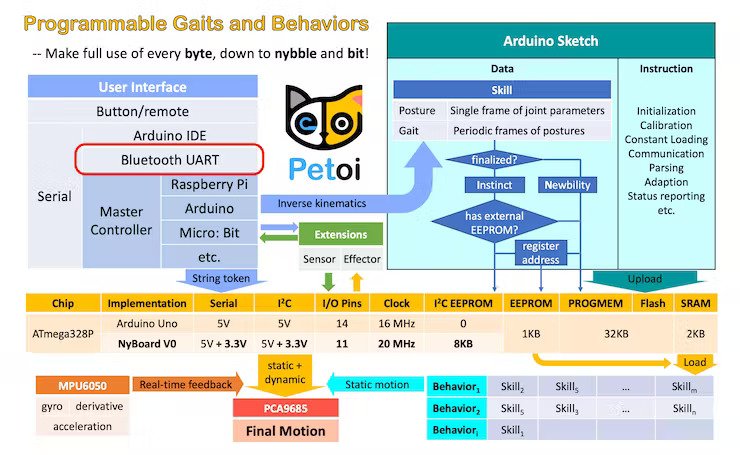
Базовый код Arduino определяет инстинктивные движения и реакции робота. Он довольно инкапсулирован, поэтому пользователям не нужно беспокоиться об утомительных аппаратных деталях сложного робота. Набор строковых команд верхнего уровня может управлять им через последовательный порт.
Я использовал Skill Composer, чтобы создать и просмотреть новое поведение прыжка. Ниже приведены две демонстрации, показывающие, как работает Skill Composer.
Я использовал Mac для создания скрипта Python и выравнивания всех события по порядку. Вы можете читать его как обычный сценарий игры.
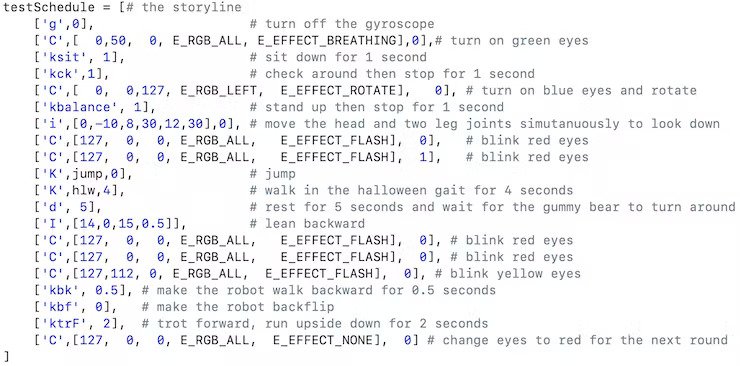
Сценарий выполняется в терминале с помощью python3 hlw.py. Он будет отправлять запросы на все существующие последовательные порты параллельно, определять, подключен ли последовательный порт к роботу Petoi, а затем отправлять задачи через последовательный порт. Последовательный порт может быть проводным или беспроводным. Для видео я использовал Bluetooth-адаптер, чтобы убрать провода.
После того, как рабочий процесс будет хорошо настроен, я могу заставить Bittle многократно воспроизводить последовательности и снимать видео с разных точек зрения с помощью одной камеры. Биттл — самый терпеливый актер, и он только однажды пожаловался на низкий заряд батареи!

Я снимал около 4 часов, чтобы собрать все медиа-ресурсы. Потребовалось около 20 попыток, чтобы кинжал упал в лучшем направлении. Постредактирование заняло больше времени, чтобы найти подходящую лицензированную фоновую музыку, вырезать соответствующее временное окно, выровнять звуковую дорожку с движением и выполнить другие утомительные корректировки для достижения наилучших результатов.

Результат
Последнее видео (в начале поста) получилось кинематографичным. Моим друзьям понравилось, и я даже получил лайки от нескольких профессиональных режиссеров. Они хотят использовать Ниббла или Биттла в качестве героев своих фильмов.
Ниже показана еще одна история между котом Ниббл и Соксом.
Создание короткого видео может показаться пустой тратой времени. Тем не менее, я думаю, что это хорошая демонстрация, чтобы показать, насколько мы улучшили пользовательский интерфейс роботов OpenCat.
- Мы создали NyBoard на базе Arduino Uno V1_2 и BiBoard на основе ESP32 V0, полностью функциональный и с открытым исходным кодом на GitHub.
- Мы улучшили структуру кода и унифицировали код движения Arduino для Nybble, Bittle и будущей модели с 12 степенями свободы. И версия Uno и версия ESP32 имеют одинаковую структуру кода.
- Помимо базы движения, мы внедрили высокоуровневые контроллеры в скрипт Python и Графический интерфейс Tinker на Mac, Windows и Linux. Он может загружать прошивку, калибровать соединения и навыки проектирования. Новые навыки, разработанные Skill Composer или симуляцией, могут быть отправлены роботу в режиме реального времени, чтобы проверить их эффективность в реальности. Гимнастические движения, такие как лазание вверх ногами и перекатывание на высокой перекладине, можно освоить несколькими щелчками мыши менее чем за час.
- Мы разработали приложение для смартфонов для iOS и Android. Это позволяет программировать кнопки для настройки и управления роботом для соревнований.
- Мы также внедрили микропитон. пакет (для перевода), который превращает ключ Wi-Fi в минимальный автономный главный компьютер. Он также позволяет групповое управление несколькими роботами.
- Мы подготовили краткие руководства по Raspberry Pi и ROS интеграция с роботами Petoi.
- Мы постоянно обновляем центр документации и добавляем обучающие видео, чтобы улучшить взаимодействие с пользователем.
- Мы разработали вводную учебную программу по C++ на основе Bittle.
- Мы также несколько раз улучшали компоненты и упаковку с момента нашего первого запуска. Теперь мы предлагаем различные комплекты с предварительно собранными компонентами и полностью предварительно собранные и настроенные роботы, чтобы упростить сборку и программирование.
На данный момент мы продали около 10 000 роботов Petoi по всему миру через наш интернет-магазин и Amazon. Отзывы пользователей жизненно важны для качества продукта и итерации функций. Технология ценна только тогда, когда широкая общественность, кроме ее изобретателя, может извлечь из нее пользу. Вот почему я трачу много времени на полировку скучных деталей выпущенных продуктов. Я надеюсь, что с фундаментальной цепочкой инструментов, созданной за эти два года, больше пользователей смогут в полной мере использовать своих роботов Petoi. Я с нетерпением жду новых творческих проектов на нашем форуме!
~~
Rz и команда Petoi
:::информация Также опубликовано здесь.
:::
Оригинал
🔥 Популярное на этой неделе
-
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27175)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Экономика и финансы (107)
- Социальные медиа и интернет-культура (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)