

Управление сложными движениями транспортных средств: методы поиска точек пересечения и препятствий
3 сентября 2024 г.Авторы:
(1) Мехди Надери;
(2) Маркос Папагеоргиу;
(3) Димитриос Труллинос;
(4) Яссон Карафиллис;
(5) Иоаннис Папамихаил.
Таблица ссылок
Аннотация и введение
Моделирование транспортных средств
Нелинейное управление с обратной связью
Коридоры OD и желаемые ориентации
Контролеры границ и безопасности
Результаты моделирования
Заключение
Приложение A: Обнаружение столкновений
Приложение B: Трансформированные кривые ISO-расстояния
Приложение C: Локальная плотность
Приложение D: Подробная информация о контроллере безопасности
Приложение E: Параметры контроллера
Ссылки
ПРИЛОЖЕНИЕ D: ПОДРОБНОСТИ КОНТРОЛЛЕРА БЕЗОПАСНОСТИ
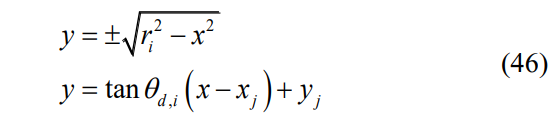
A. Нахождение точки пересечения, когда EV и препятствие имеют круговое и косое движение соответственно
В этом случае точку пересечения можно найти, пересекая следующие уравнения движения:
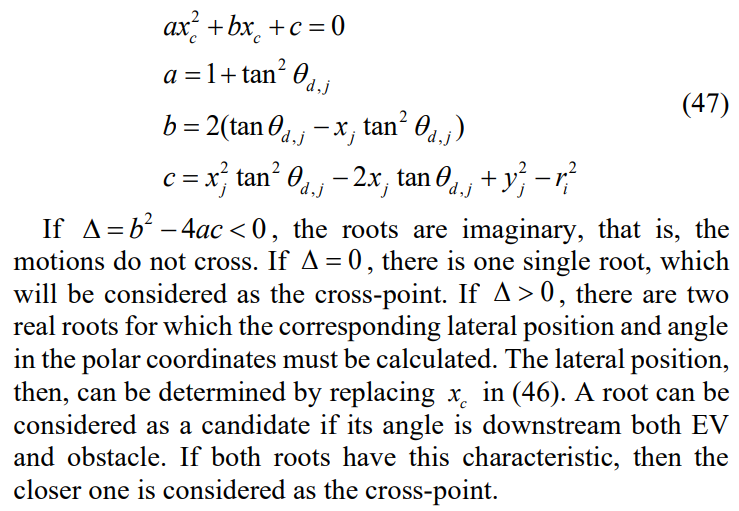
Итак, продольное положение точки пересечения является одним из корней следующего полинома второго порядка, который получается из (46) после упрощения:
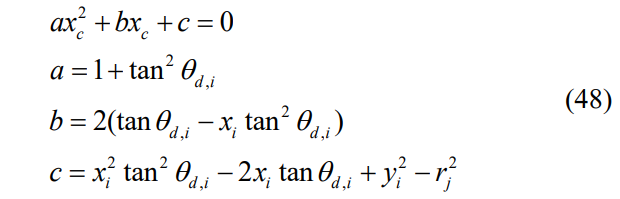
B. Нахождение точки пересечения, когда EV и препятствие имеют наклонные и круговые движения соответственно
Следуя процедуре, аналогичной предыдущей, точку пересечения можно найти, вычислив корни следующего уравнения:
Найденные точки пересечения должны быть преобразованы в координаты, соответствующие желаемой ориентации EV. Если они находятся за EV или препятствием или корни не являются реальными, они игнорируются. В противном случае рассматривается ближайшая точка пересечения.
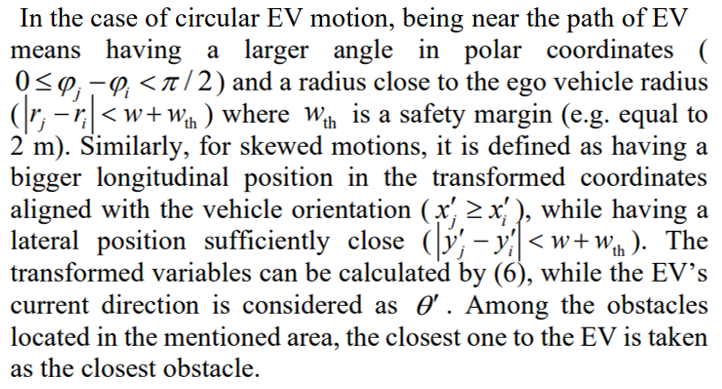
C. Поиск ближайшего текущего препятствия
Эта статьядоступно на arxivпо лицензии CC 4.0.
Оригинал
🔥 Популярное на этой неделе
-
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
20 самых популярных статей TechRepublic в 2023 году
23 декабря 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г. -
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27740)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Экономика и финансы (107)
- Социальные медиа и интернет-культура (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)