
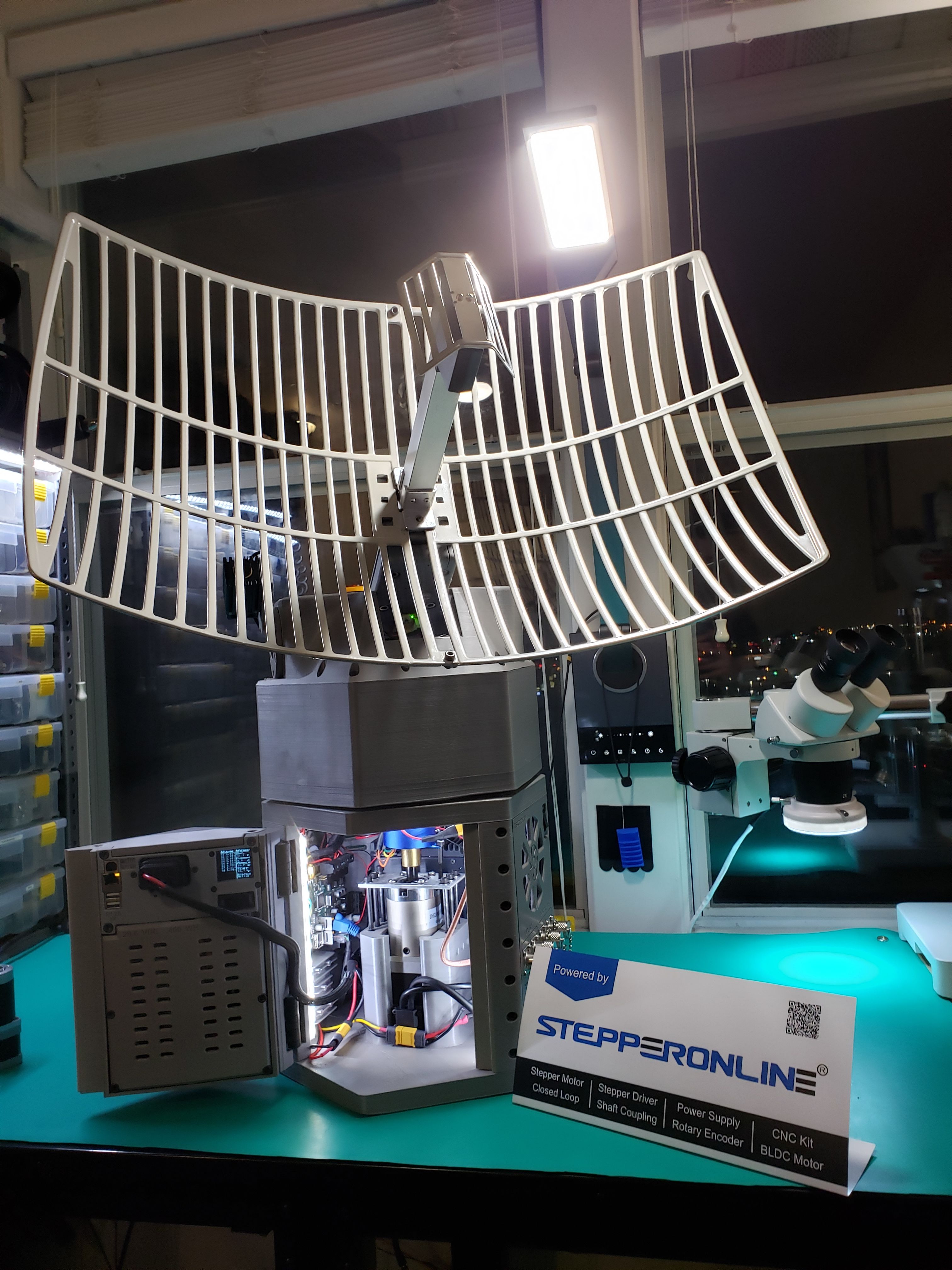
Учебное пособие «Сделай сам»: создание системы для отслеживания и связи со спутниками на орбите
28 февраля 2022 г.Цель моего проекта — построить систему слежения за спутниками на орбите. Система разместит направленные антенны и позволит связываться со спутниками. Для проекта требуются шаговые двигатели с высоким крутящим моментом.
Запасы
передаточное отношение шагового двигателя планетарного редуктора 100: 1
большой подшипник
шестиугольный кусок
стальной удлинитель приводного вала 12 мм
направляющая двигателя с жесткой фланцевой муфтой
3D печатные детали
несколько схем, основанных на микросхеме Trinamic Motor Control TMC2041 IC
датчик движения
контактные кольца через отверстия
Шаг 1: Установка двигателя
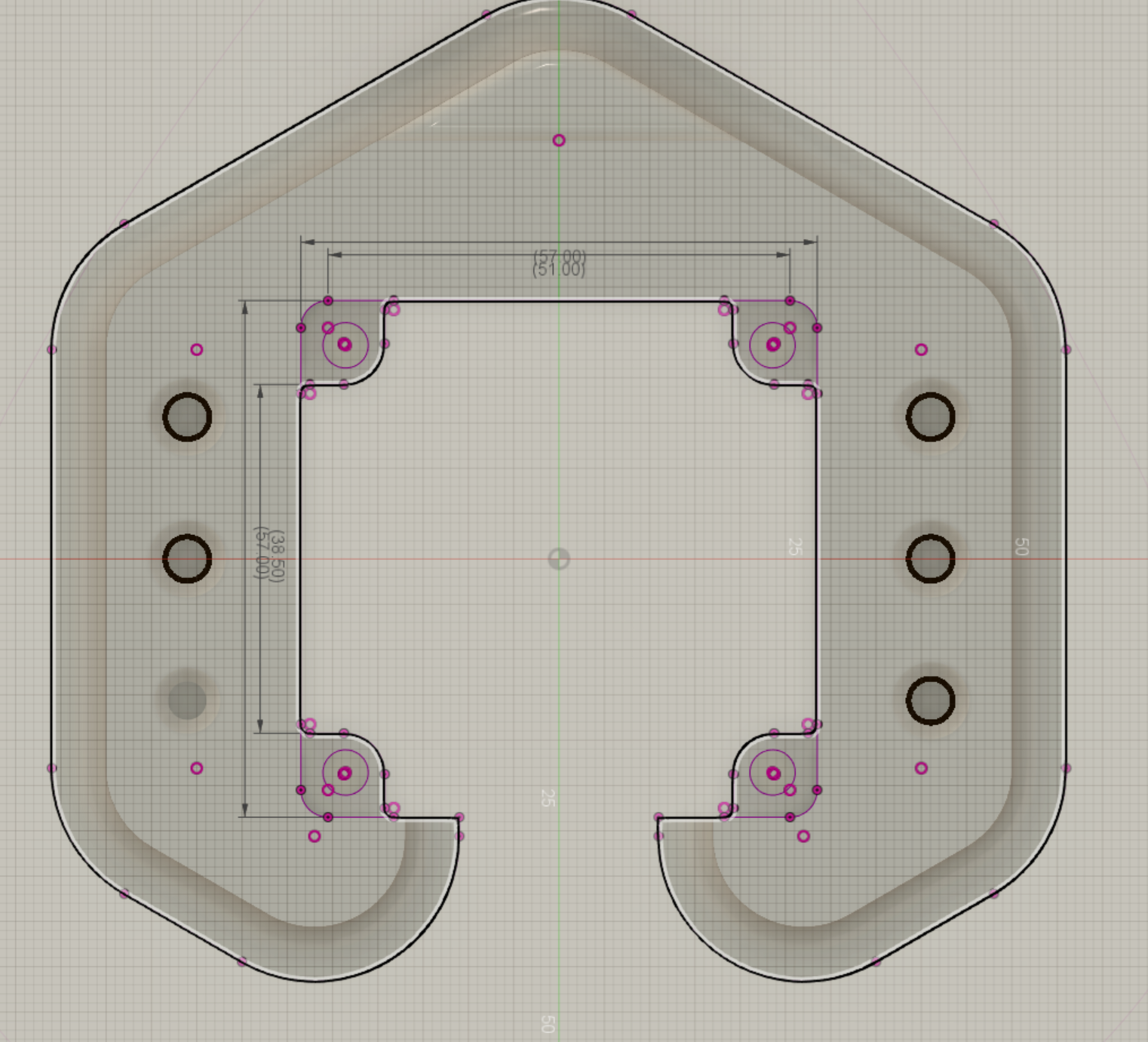
Установка мотора была несколько сложной. Он включал в себя проектирование центральной опоры внутри корпуса для размещения двигателя. Затем изготовление металлической пластины для крепления двигателя к пилону.

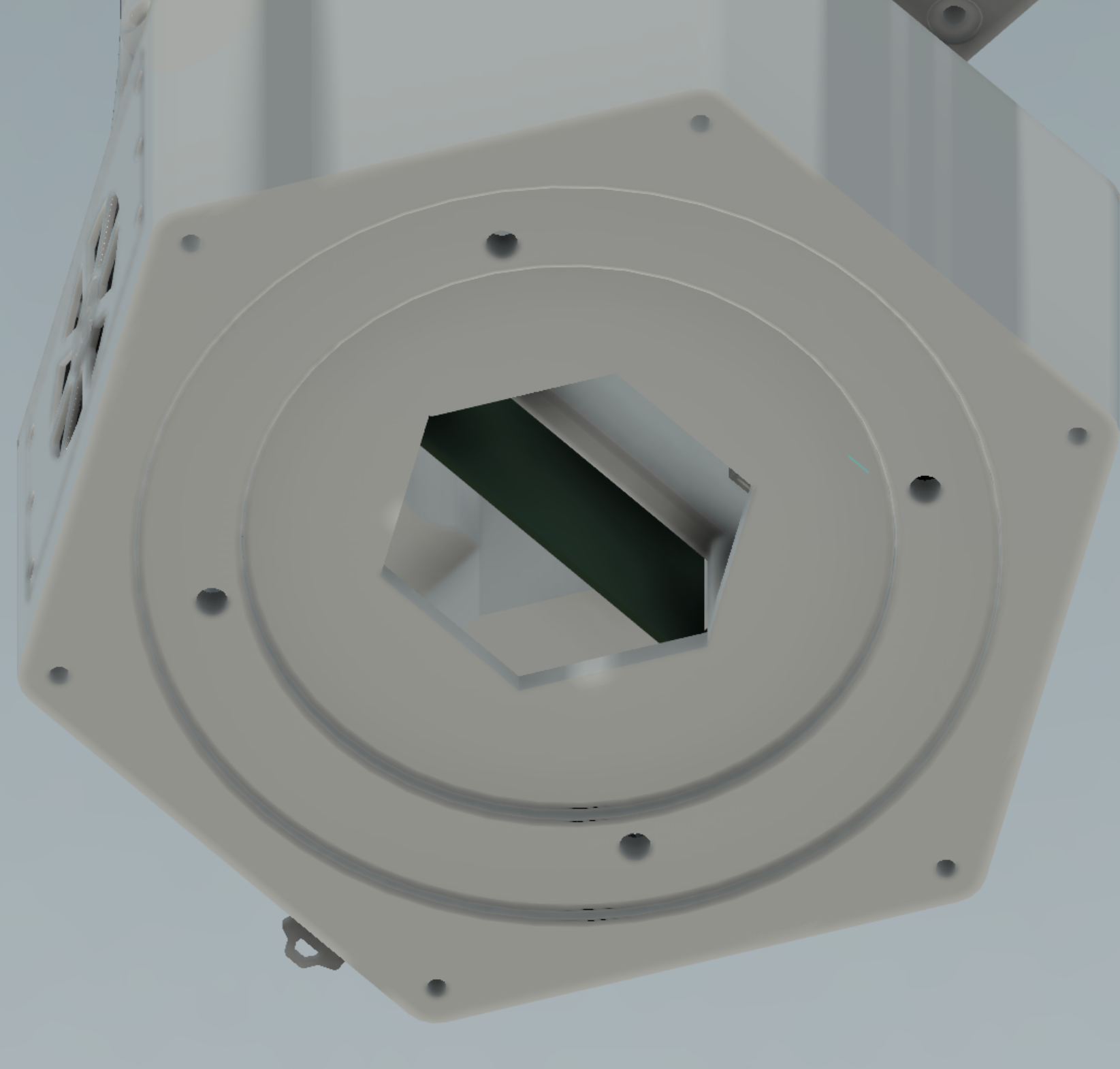
Затем к верхней части рамы был прикручен большой подшипник, а затем к подшипнику был прикручен ротор. Верх приводного вала был оснащен шестигранной деталью, которая сопрягалась с нижней частью ротора.
Затем ротор был электрически соединен с нижним блоком через токосъемное кольцо.
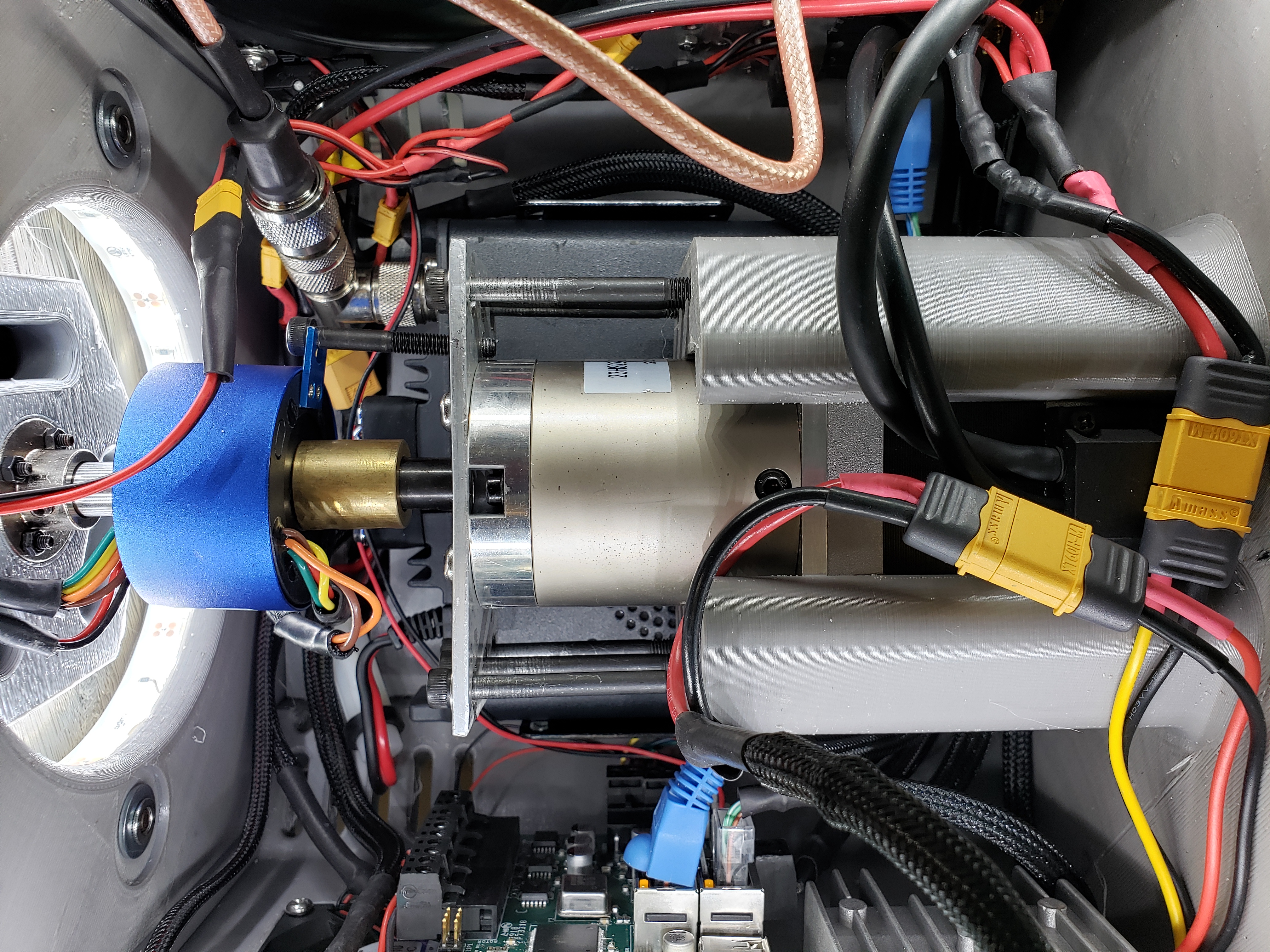
В дополнение к этим компонентам я сделал 12-миллиметровый стальной удлинитель приводного вала и использовал его с латунной муфтой вала из . Целью этого устройства является соединение вала двигателя с удлинительным валом. Затем на удлинительный вал было добавлено токосъемное кольцо.
Наконец, жесткая направляющая двигателя с фланцевой муфтой была размещена поверх удлинительного вала, что позволило мне установить шестигранную приводную деталь на верхнюю часть вала и соединить двигатель с ротором. Эта последняя деталь была напечатана на 3D-принтере из-за ее уникальной формы и позволила мне управлять ротором.

К сожалению, пластик не очень прочный, и в результате ротор имеет около 5 градусов раскачивания вперед и назад. Однако это трудная для решения проблема. Я надеюсь исправить эту проблему в новой модели, которую я планирую построить. Кроме того, я надеюсь, что выбор высокоточного двигателя с планетарным редуктором даст мне меньше раскачивания двигателя, чем экономичный планетарный редуктор, который я использовал на предыдущей модели.
Шаг 2: Запустите двигатель
Для управления двигателем я разработал и собрал несколько схем на основе микросхемы Trinamic Motor Control TMC2041. Этот интегрированный чип упрощает управление шаговыми двигателями, позволяя управлять двумя двигателями с одного чипа. Эта микросхема может похвастаться замечательным микрошаговым разрешением 1/256.
Это также дает устройству замечательную пошаговую разрешающую способность, которую можно рассчитать как количество шагов на градус двигателя (1,8 градуса/передаточное число 57), а затем разделить это количество на микрошаговое разрешение, равное 256. Результирующее пошаговое разрешение текущего проекта затем 0,000150 градусов от 150 миллионных долей градуса. Это чрезвычайно высокое разрешение обеспечивает очень плавное ускорение двигателя и еще больше увеличивает его полезность.
Шаг 3: Измерьте ускорение и прочитайте направление
К сожалению, текущая схема не позволяет использовать встроенный в двигатель поворотный энкодер. В результате устройство использует датчик движения, прикрепленный к ротору, для измерения ускорений и считывания направления. Хотя мне было бы очень полезно иметь энкодер, я не могу освободить достаточно контактов GPIO, чтобы прочитать все контакты энкодера.
Благодаря новому двигателю с передаточным числом 1:100 новый дизайн позволит достичь разрешения в 70 миллионных долей градуса. Это будет еще одно улучшение, которое приведет к более плавному движению двигателя и более точной работе.
Подведение итогов
Цель моего проекта — построить систему слежения за спутниками на орбите. Система разместит направленные антенны и позволит связываться со спутниками. Для проекта требуются шаговые двигатели с высоким крутящим моментом.
Оригинал
🔥 Популярное на этой неделе
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27648)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Экономика и финансы (107)
- Социальные медиа и интернет-культура (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)