

Управление автоматизированными транспортными средствами на больших кольцевых перекрестках без полос движения: результаты моделирования
2 сентября 2024 г.Авторы:
(1) Мехди Надери;
(2) Маркос Папагеоргиу;
(3) Димитриос Труллинос;
(4) Яссон Карафиллис;
(5) Иоаннис Папамихаил.
Таблица ссылок
Аннотация и введение
Моделирование транспортных средств
Нелинейное управление с обратной связью
Коридоры OD и желаемые ориентации
Контролеры границ и безопасности
Результаты моделирования
Заключение
Приложение A: Обнаружение столкновений
Приложение B: Трансформированные кривые ISO-расстояния
Приложение C: Локальная плотность
Приложение D: Подробная информация о контроллере безопасности
Приложение E: Параметры контроллера
Ссылки
VI. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
Разработанная стратегия управления является универсальной и может быть применена к любой сложной кольцевой развязке. Фактически, в конструкции
процедура, мы не используем никаких конкретных деталей исследования случая. Единственное геометрическое предположение заключается в том, что внутренние и внешние границы являются круглыми, что является общим для большого количества кольцевых развязок. Кроме того, ответвления вводятся угловыми положениями и шириной; следовательно, может быть рассмотрена любая возможная топология ответвлений, как симметричная, так и асимметричная. В этом разделе мы рассматриваем в качестве исследования случая знаменитую кольцевую развязку на площади Шарля де Голля (Париж, Франция), которая имеет внешний (внутренний) радиус 84 м (46 м), следовательно, ширину 38 м. Она состоит из 12 двунаправленных ответвлений, что приводит к 144 различным движениям OD. Горизонтальная ветвь справа на рис. 1 — это знаменитый проспект Елисейские поля. Это, вероятно, самый сложный реальный пример исследования кольцевой развязки.
A. Настройка моделирования и параметры управления
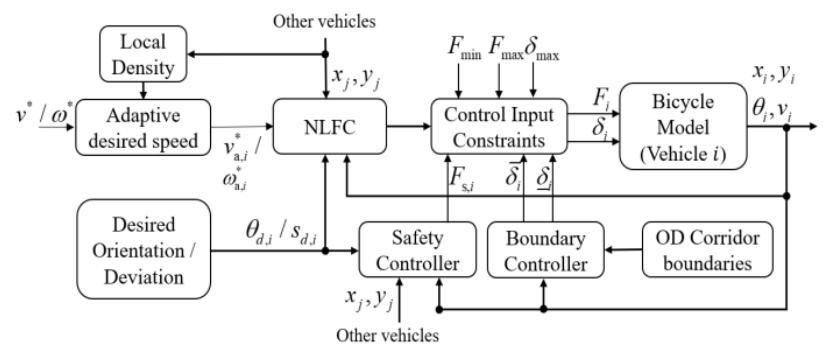
Предлагаемая система управления реализована на платформе TrafficFluid-Sim [40], которая является расширением симулятора SUMO [41]. Было сделано несколько модификаций для облегчения моделирования транспортных средств на кольцевой развязке с использованием предлагаемой стратегии [40]. В частности, в симулятор была добавлена дискретная модель велосипеда (8) для представления динамики транспортного средства с более высокой точностью, чем модель с двойным интегратором, ввиду более сильных поворотов транспортного средства в городской среде. Рассматриваются все 144 маршрута OD, и отдельные потоки спроса OD определяются пропорционально произведению ширины соответствующих въездных и выездных ветвей. Моделирование охватывает, за пределами кольцевой развязки, также связанные ветви на расстоянии до 65 м от внешней границы кольцевой развязки. Таким образом, въезжающие (выезжающие) транспортные средства выпускаются (сбрасываются) на расстоянии 65 м вверх по течению (вниз по течению) кольцевой развязки.
Б. Микроскопические результаты
Для оценки уместности предлагаемой методологии первоначально проводится моделирование 12 транспортных средств с различными OD на кольцевой развязке Place Charles de Gaulle. Результаты моделирования представлены на рис. 9 - 12. Как видно на рис. 9, траектории транспортных средств на кольцевой развязке гладкие, и все транспортные средства соответствующим образом направляются к своим соответствующим пунктам назначения. Транспортные средства с удаленными пунктами назначения, например, транспортные средства 1, 4 и 11, частично проезжают близко к внутренней границе. Другие транспортные средства,
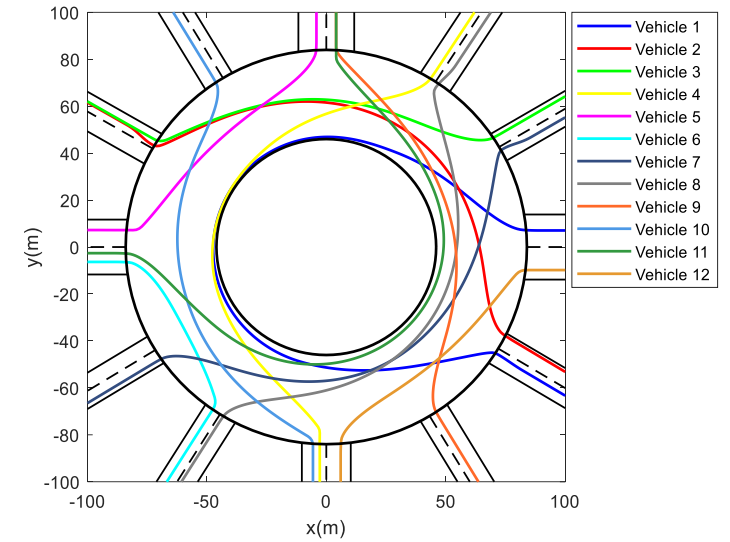
особенно те, у которых более близкие пункты назначения, например, транспортные средства 5, 6 и 12, не приближаются к внутренним кольцевым участкам.
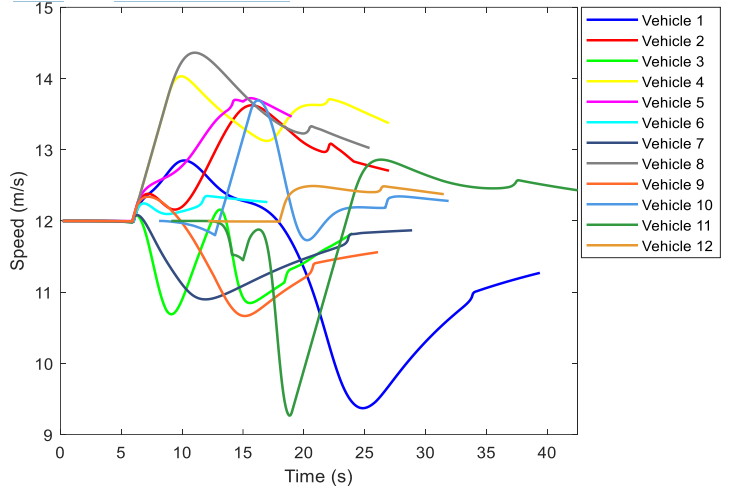
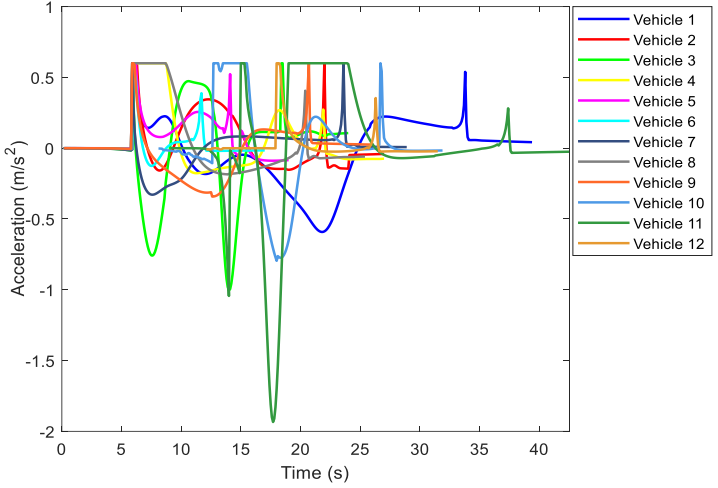
Транспортные средства, как правило, следуют желаемой скорости, т. е. 12 м/с, как на ответвлениях, так и на кольцевой развязке. Однако они могут временно отклоняться (в положительную или отрицательную сторону) от желаемой скорости, чтобы избежать столкновений, см. рис. 10. Например, транспортное средство 8 подталкивается другими транспортными средствами и достигает скорости до 14,5 м/с, что все еще меньше максимально допустимой скорости. Кроме того, рис. 11 иллюстрирует ускорения транспортных средств, при которых можно наблюдать их усилия, с одной стороны, следовать желаемой скорости и, с другой стороны, избегать столкновения с другими транспортными средствами с помощью случайных замедлений. Обратите внимание, что когда кольцевая развязка не переполнена, как в этой симуляции, транспортные средства движутся быстро, и некоторым из них, например, транспортным средствам 3 и 11, может потребоваться сильное замедление при столкновении с другим транспортным средством, приближающимся с другого угла. Напротив, в ситуациях с высокой плотностью движения транспортные средства движутся с более низкой скоростью, и, следовательно, любые произведенные замедления для предотвращения столкновений меньше.
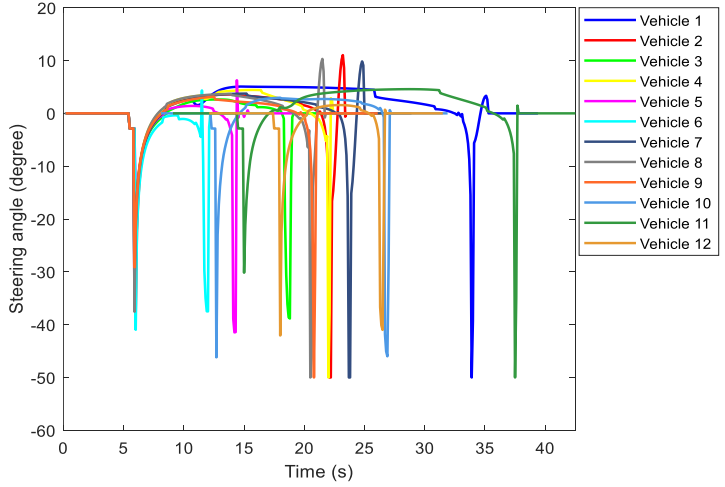
Наконец, углы поворота транспортного средства показаны на рис. 12, где резкие значения обоснованно возникают, когда транспортное средство въезжает или выезжает с кольцевой развязки. Фактически, необходимо иметь значительный поворот, аналогичный человеческому вождению, при въезде на кольцевую развязку, чтобы избежать перпендикулярного движения. Кроме того, при выезде транспортным средствам необходимо поворачивать относительно резко, чтобы адаптироваться к ориентации выезжающей ветки. Кроме того, некоторые плавные углы поворота генерируются при повороте на кольцевой развязке, чтобы избежать столкновений.
Второе моделирование, включающее в общей сложности 1600 транспортных средств в течение 26 минут, проводится для подтверждения эффективности представленного подхода в ситуациях с скоплением людей. Снимок моделирования представлен на рис. 13, а видео доступно по адресу https://bit.ly/36exR42. Как показано на видео, транспортные средства движутся к своим пунктам назначения, не выходя за пределы кольцевой развязки, хотя иногда заезжая на них из-за вмешательства контроллера границы, и без каких-либо столкновений. Когда кольцевая развязка не переполнена (в начале и конце моделирования), транспортные средства движутся быстро, близко к желаемой скорости; время от времени замедляясь, чтобы уступить дорогу другим транспортным средствам, как в моделировании с 12 транспортными средствами выше. В ситуациях с скоплением людей транспортные средства могут иметь частые ограниченные ускорения и замедления, чтобы продвигаться в потоке и избегать столкновений, как
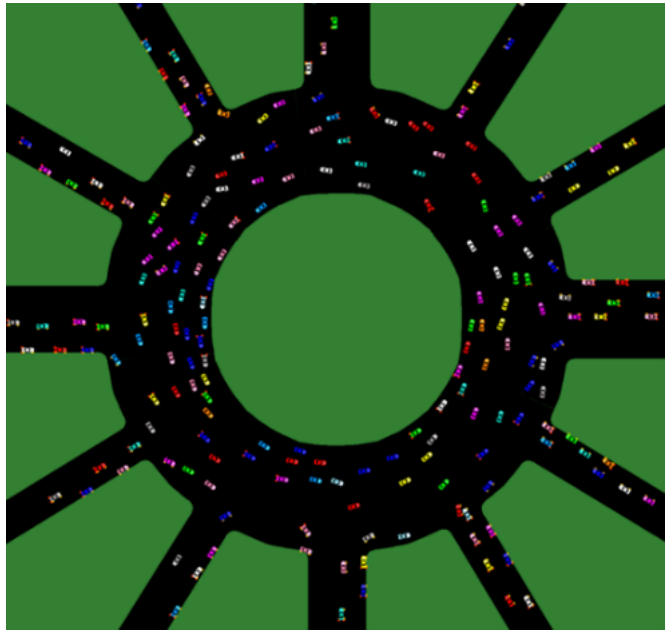
также испытано в транспортном средстве, управляемом человеком, в аналогичных условиях.
C. Макроскопические результаты
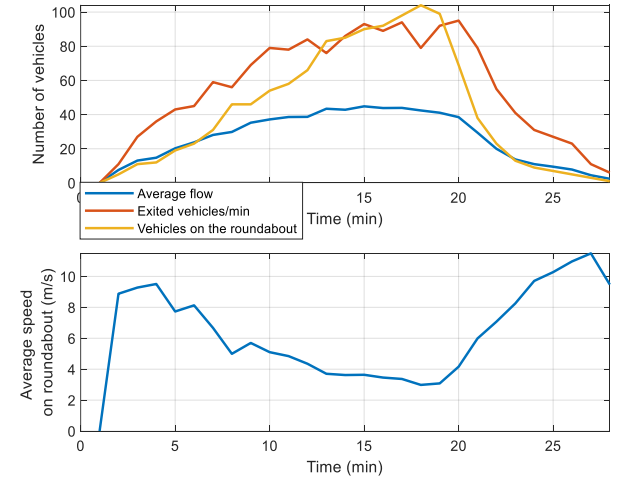
Как упоминалось ранее, кольцевые развязки являются критически важными элементами в городских дорожных сетях, поэтому важно, чтобы используемая стратегия движения транспортных средств обеспечивала соответствующую пропускную способность. Для исследования таких аспектов транспортного потока полезно извлечение макроскопических данных о движении на кольцевой развязке. В частности, принимая во внимание период выборки в 1 минуту, мы измеряем несколько переменных, включая количество транспортных средств на кольцевой развязке, количество выехавших транспортных средств, среднюю скорость транспортных средств на кольцевой развязке и средний поток на кольцевой развязке; последнее является средним значением 12 измерений детекторов, установленных между каждыми двумя последовательными ответвлениями.
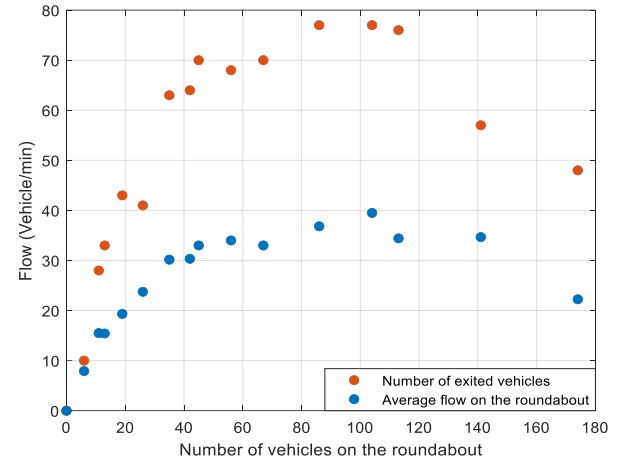
Основная диаграмма кольцевой развязки (FD) получается путем построения графика количества выехавших транспортных средств или среднего потока на кольцевой развязке в зависимости от количества транспортных средств на кольцевой развязке (плотности) для всех периодов выборки, как показано на рис. 14 для случая, соответствующего представленному видео. Можно увидеть, что по мере увеличения спроса, поступающего с ответвлений (и, следовательно, плотности кольцевой развязки), пропускная способность кольцевой развязки увеличивается, пока не достигнет предела для высоких значений плотности. При высоких плотностях ухудшения пропускной способности не наблюдается. Это макроскопическое поведение возникает из-за предоставления приоритета вращающимся транспортным средствам, поскольку въезжающие транспортные средства снижают свою скорость и вливаются в кольцевую развязку более консервативно, если они сталкиваются с высокой плотностью (см. Раздел III.C). В результате, хотя средняя скорость снижается при более высоких плотностях, нет затора,
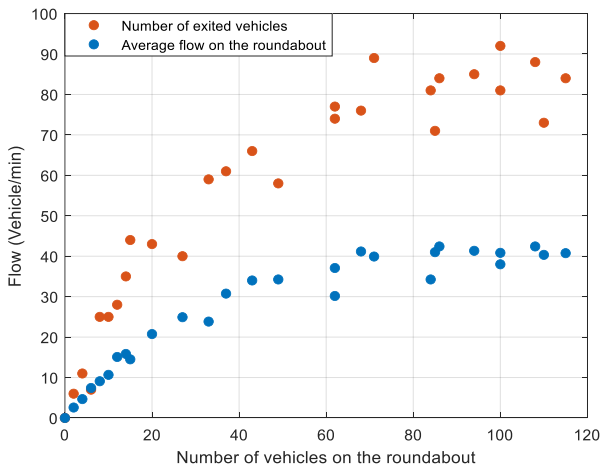
На кольцевой развязке складывается ситуация, когда средняя скорость падает практически до нуля, а на въездах можно наблюдать небольшие очереди.
Временные гистограммы упомянутых макроскопических переменных показаны на рис. 15, где минимальная средняя скорость достигается, когда количество транспортных средств на кольцевой развязке максимально. Обратите внимание, что уменьшение потока и количества выехавших транспортных средств после 19-й выборки обусловлено меньшими въездными потоками.
Интересно исследовать, что произойдет, если приоритет будет отдан въезжающим, а не вращающимся транспортным средствам. Это можно реализовать, внеся некоторые незначительные изменения в систему управления. Во-первых, отменяется зависимость желаемой скорости въезжающих транспортных средств от плотности сектора кольцевой развязки, т. е. (20). Во-вторых, мы увеличиваем потенциальную функцию въезжающих транспортных средств, видимых вращающимися транспортными средствами, чтобы увеличить их важность (отталкивание) в предотвращении столкновений. В результате в конфликтах между въезжающим и вращающимся транспортным средством последнее уступает, чтобы пропустить первое на кольцевую развязку. На рис. 16 изображена результирующая FD, где теперь часть убывающего потока становится видимой при высоких плотностях. Фактически, транспортные средства продолжают въезжать на кольцевую развязку, даже если перед ними много транспортных средств, что приводит к квазипробке, в то время как на въездных ответвлениях нет очереди. В этой ситуации средняя скорость снижается до значений, близких к нулю, в то время как количество выехавших транспортных средств и средний поток значительно падают, см. рис. 17. Обратите внимание, что изменение влияет на FD в основном для высоких плотностей, в то время как различия в пропускной способности и критической плотности незначительны. Интересно, что в реальной системе въезжающие транспортные средства имеют приоритет над вращающимися транспортными средствами на кольцевой развязке. К сожалению, это было
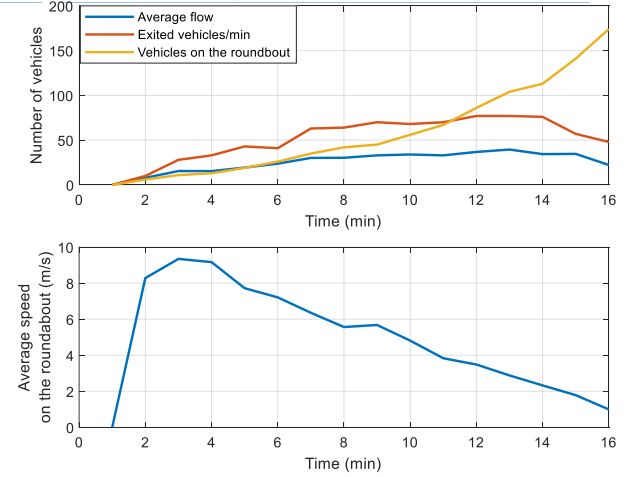
невозможно получить реальные данные, отражающие текущую работу кольцевой развязки.
Эта статьядоступно на arxivпо лицензии CC 4.0.
Оригинал
🔥 Популярное на этой неделе
-
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27538)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Экономика и финансы (107)
- Социальные медиа и интернет-культура (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)