

Обнаружение и контроль столкновений в автоматизированном моделировании транспортных средств
2 сентября 2024 г.Авторы:
(1) Мехди Надери;
(2) Маркос Папагеоргиу;
(3) Димитриос Труллинос;
(4) Яссон Карафиллис;
(5) Иоаннис Папамихаил.
Таблица ссылок
Аннотация и введение
Моделирование транспортных средств
Нелинейное управление с обратной связью
Коридоры OD и желаемые ориентации
Контролеры границ и безопасности
Результаты моделирования
Заключение
Приложение A: Обнаружение столкновений
Приложение B: Трансформированные кривые ISO-расстояния
Приложение C: Локальная плотность
Приложение D: Подробная информация о контроллере безопасности
Приложение E: Параметры контроллера
Ссылки
II. МОДЕЛИРОВАНИЕ ТРАНСПОРТНЫХ СРЕДСТВ
А. Динамика транспортного средства
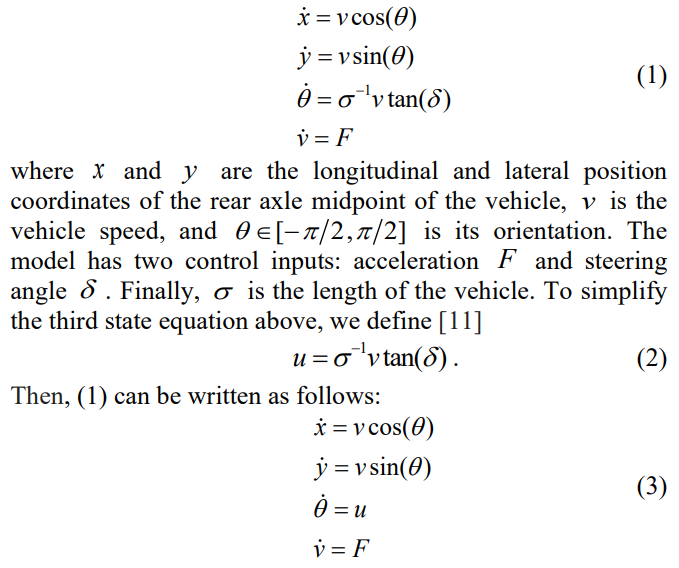
Кинематическая модель велосипеда, которая широко использовалась в литературе [11], [12], [36], используется в этом исследовании для представления динамики транспортного средства. Переменные модели визуализированы на рис. 2, а модель пространства состояний выглядит следующим образом [11]:
B. Трансформация для кругового движения
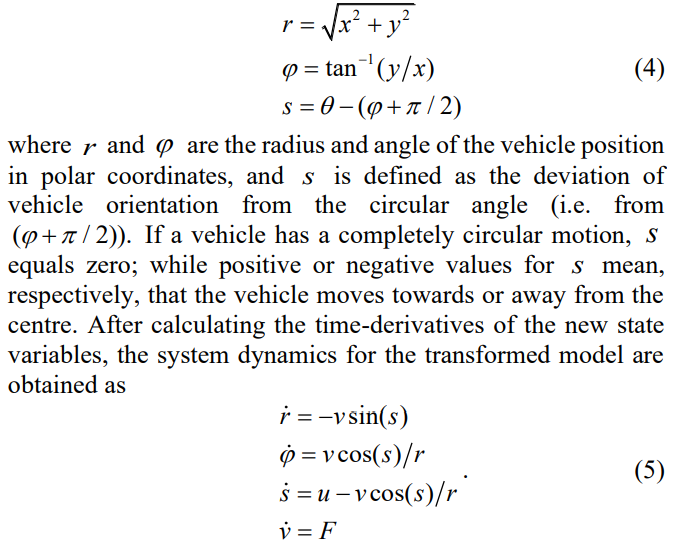
При повороте на кольцевой развязке выгодно преобразовать вышеуказанную динамику транспортного средства в полярные координаты для упрощения анализа и проектирования контроллера. Предполагая, что центр кольцевой развязки является началом декартовых и полярных координат, три новые переменные состояния в полярных координатах определяются следующим образом, в то время как четвертая, т. е. скорость, остается неизменной:
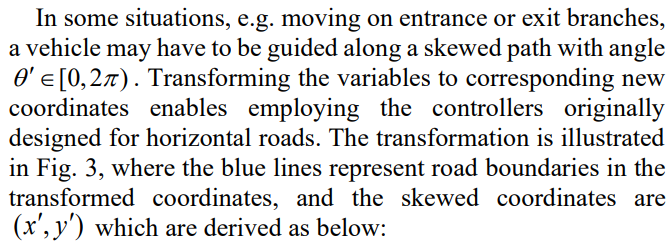
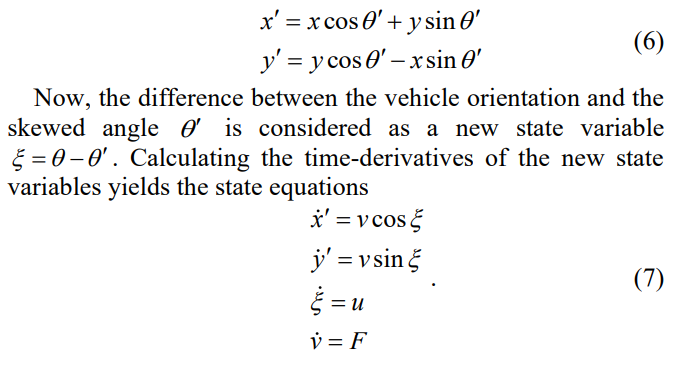
C. Преобразование для перекошенного пути
![Fig. 2. Illustration of the bicycle model variables [11]](https://cdn.hackernoon.com/images/fWZa4tUiBGemnqQfBGgCPf9594N2-3ac3zk0.png)
![Fig. 3. The transformation for skewed path [34]](https://cdn.hackernoon.com/images/fWZa4tUiBGemnqQfBGgCPf9594N2-itd3z99.png)
D. Модель велосипеда с выборочными данными
Для внедрения в практические структуры, такие как симуляторы, модель велосипеда должна быть дискретизирована. Вместо использования приближенных подходов дискретизации, таких как метод Эйлера, точная модель выборочных данных получается путем интегрирования (1) с учетом постоянного значения для управляющих сигналов в течение периода выборки. Результирующая модель с дискретным временем выглядит следующим образом [37]:
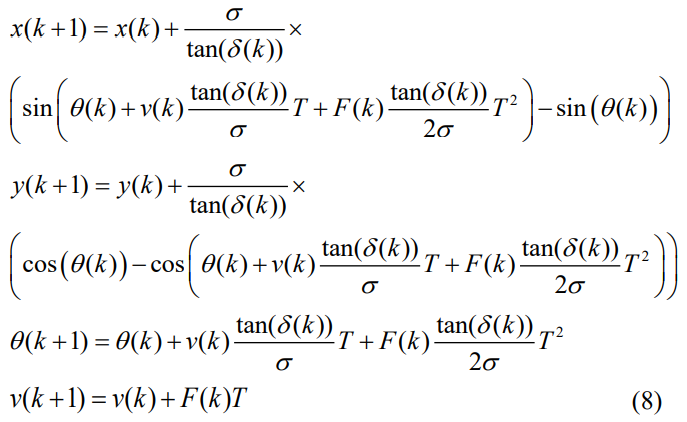
гдек= 0, 1, 2, … — индекс дискретного времени, а T — период выборки. Для полярной модели (5) точное интегрирование представляется затруднительным; поэтому мы используем (8) при моделировании динамики транспортного средства как на прямых, так и на кольцевых дорогах; в то время как контроллеры для них разработаны на основе соответствующих моделей непрерывного времени.
Избежание столкновений является важнейшей целью стратегий управления; следовательно, необходимо, при моделировании движения транспортного средства, обнаруживать возможные столкновения между транспортными средствами. В приложении A представлена процедура обнаружения столкновений для прямоугольных транспортных средств.
Эта статьядоступно на arxivпо лицензии CC 4.0.
Оригинал
🔥 Популярное на этой неделе
-
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27087)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Экономика и финансы (107)
- Социальные медиа и интернет-культура (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)