

Усовершенствованные методы нелинейного управления с обратной связью для автоматизированных транспортных средств
2 сентября 2024 г.Авторы:
(1) Мехди Надери;
(2) Маркос Папагеоргиу;
(3) Димитриос Труллинос;
(4) Яссон Карафиллис;
(5) Иоаннис Папамихаил.
Таблица ссылок
Аннотация и введение
Моделирование транспортных средств
Нелинейное управление с обратной связью
Коридоры OD и желаемые ориентации
Контролеры границ и безопасности
Результаты моделирования
Заключение
Приложение A: Обнаружение столкновений
Приложение B: Трансформированные кривые ISO-расстояния
Приложение C: Локальная плотность
Приложение D: Подробная информация о контроллере безопасности
Приложение E: Параметры контроллера
Ссылки
III. НЕЛИНЕЙНОЕ УПРАВЛЕНИЕ С ОБРАТНОЙ СВЯЗЬЮ
В качестве ядра для принятия решений в реальном времени каждым транспортным средством при движении по кольцевой развязке или по связанным прямым ответвлениям соответственно используются два нелинейных контроллера.
A. Нелинейный контроллер для прямых (горизонтальных) дорог
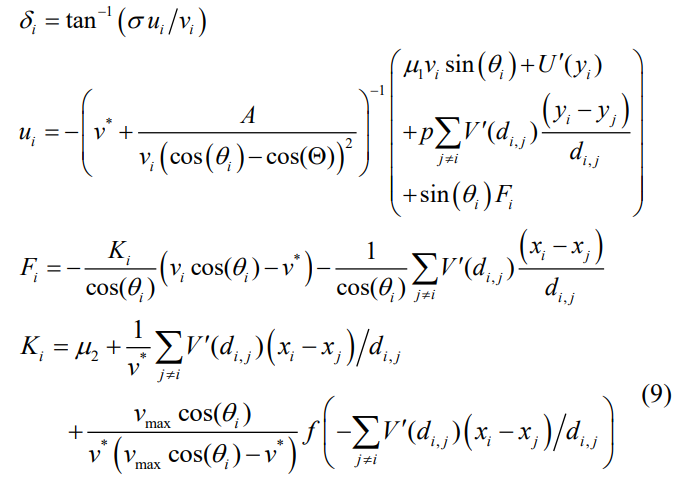
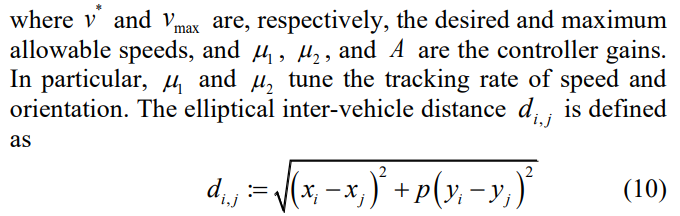
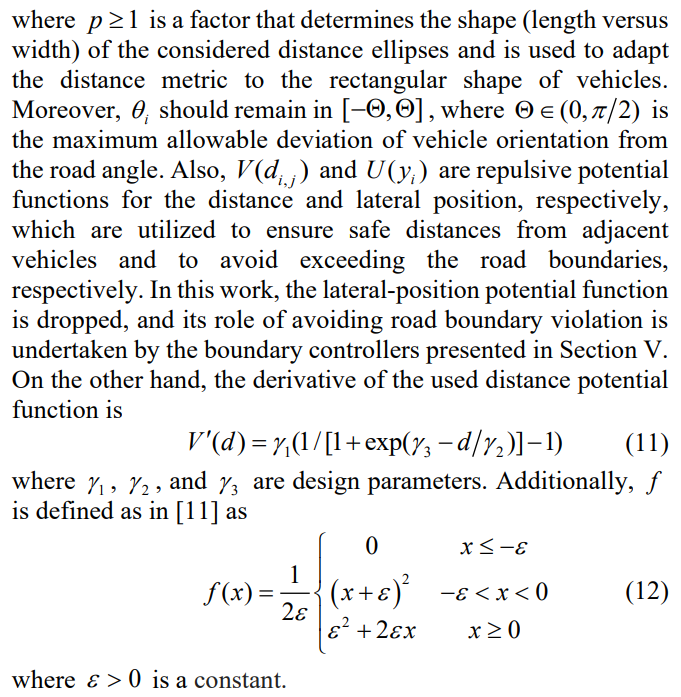
Нелинейный контроллер обратной связи (NLFC) разработан в [11] для управления транспортными средствами на прямой (горизонтальной) дороге без полос, который использует переменные состояния транспортного средства и его расстояние от других соседних транспортных средств. Этот контроллер был разработан для непрерывной модели времени (1) и гарантирует некоторые свойства, включая избежание столкновений, нарушение границ, отрицательную скорость и превышение допустимой максимальной скорости. Кроме того, при наличии достаточного пространства транспортные средства достигают желаемых продольных скоростей, в то время как ускорения, ориентации, боковые скорости и углы поворота стремятся к нулю (на открытой прямой дороге). Закон обратной связи гласит [11]:
B. Нелинейный контроллер для кольцевых дорог
Для управления транспортным средством на кольцевой развязке мы используем NLFC, представленный в [12], который специализирован для кольцевых дорог, например, кольцевых дорог или кольцевых развязок, структура которых похожа на NLFC для прямых дорог. Он строго гарантирует (в непрерывном времени) избежание столкновений, нарушения границ и превышения максимально допустимой угловой скорости, отслеживая желаемую угловую скорость, сходимость ускорения и ориентации (отклонение от кругового угла) к нулю. Закон обратной связи гласит:
где
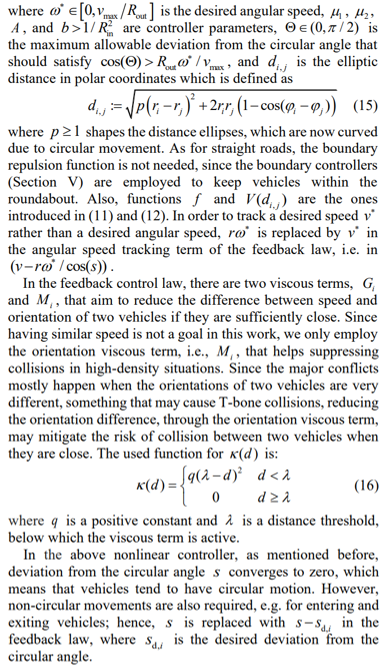
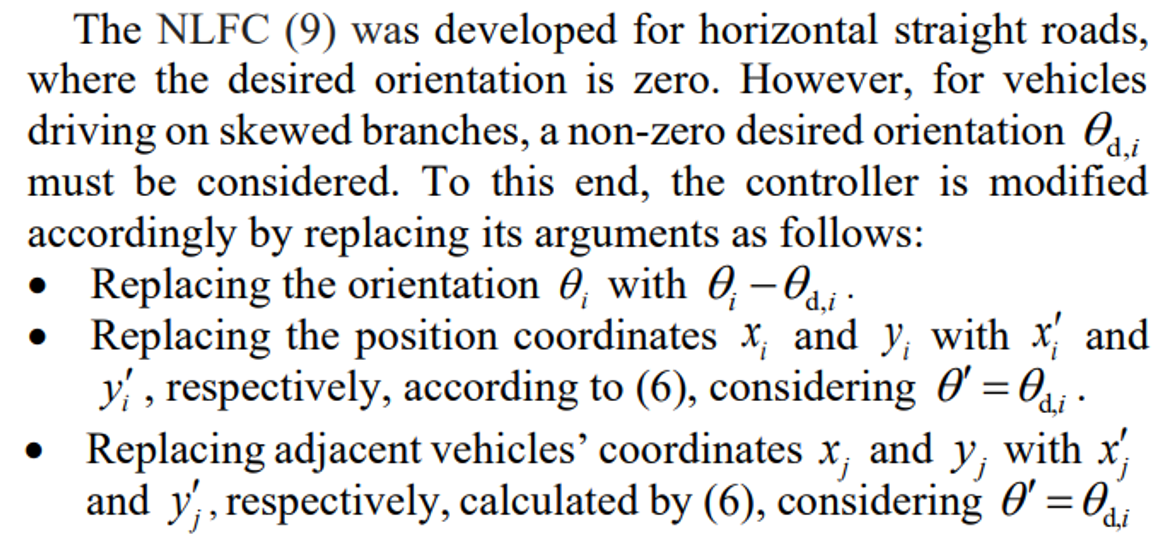
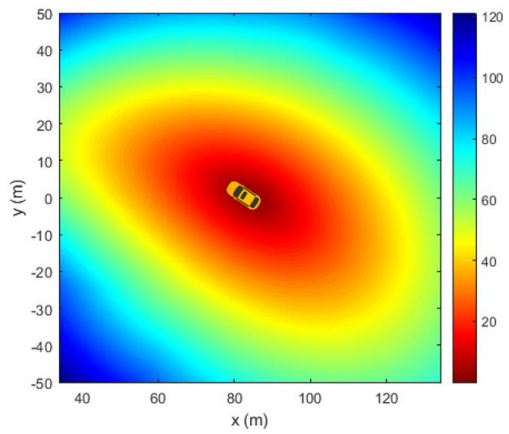
Кроме того, определение расстояния и, следовательно, «аура» изодистанции, окружающая каждое транспортное средство, должны быть изменены в соответствии с желаемым отклонением. Это требует преобразования, которое описано в Приложении B и приводит к измененным кривым изодистанции (ауре) вокруг транспортного средства, как показано на рис. 4, где изогнутые эллипсы, окружающие транспортное средство эго, выровнены с ориентацией транспортного средства, чтобы избежать потери бокового пространства вокруг транспортного средства, обеспечивая при этом безопасность.
Необходимо подчеркнуть, что эллипсы изорасстояний простираются вокруг каждого транспортного средства. Это означает, что на основе NLFC к каждому транспортному средству прикладывают «силы» от препятствий вокруг них. В то время как отталкивание от передних транспортных средств типично для движения по полосе, NLFC для движения без полосы также создают силы «подталкивания» из-за препятствий, которые могут быть расположены слева, справа или сзади транспортного средства. Помимо последствий для безопасности, было обнаружено, что подталкивание транспортного средства оказывает благотворное влияние на макроскопические свойства возникающего транспортного потока [38],[39].
Центр всех упомянутых аур, от эллипсов, определенных для прямых или косых движений, до изогнутых эллипсов для кругового движения, находится в середине задней оси, как представлено в (1). Таким образом, они охватывают меньшую область перед автомобилем эго, по сравнению с задней частью. Имея различную ориентацию и двигаясь вперед, автомобили имеют более высокий риск столкновения в своей передней части в переполненных ситуациях. Чтобы уменьшить этот риск,
мы перемещаем центр ауры в середину передней оси. Таким образом, межтранспортное расстояние рассчитывается исходя из положения середины передней оси.
C. Адаптивная желаемая скорость
Эта статьядоступно на arxivпо лицензии CC 4.0.
Оригинал
🔥 Популярное на этой неделе
-
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г. -
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27352)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Экономика и финансы (107)
- Социальные медиа и интернет-культура (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)