

Оптимизация потока транспортных средств на сложных кольцевых развязках: коридоры OD и желаемые ориентации
2 сентября 2024 г.Авторы:
(1) Мехди Надери;
(2) Маркос Папагеоргиу;
(3) Димитриос Труллинос;
(4) Яссон Карафиллис;
(5) Иоаннис Папамихаил.
Таблица ссылок
Аннотация и введение
Моделирование транспортных средств
Нелинейное управление с обратной связью
Коридоры OD и желаемые ориентации
Контролеры границ и безопасности
Результаты моделирования
Заключение
Приложение A: Обнаружение столкновений
Приложение B: Трансформированные кривые ISO-расстояния
Приложение C: Локальная плотность
Приложение D: Подробная информация о контроллере безопасности
Приложение E: Параметры контроллера
Ссылки
IV. КОРИДОРЫ OD И ЖЕЛАЕМЫЕ ОРИЕНТАЦИИ
А. Определение коридоров OD
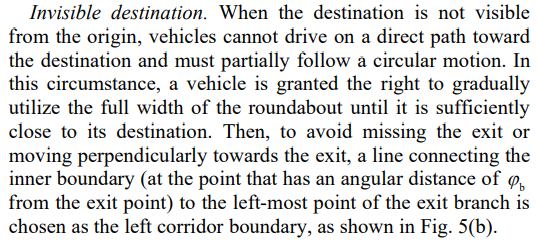
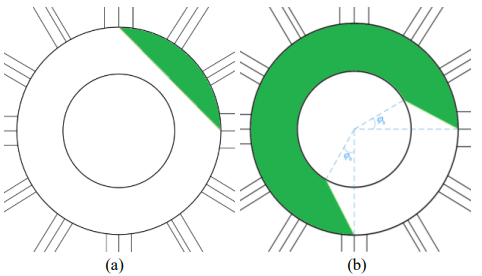
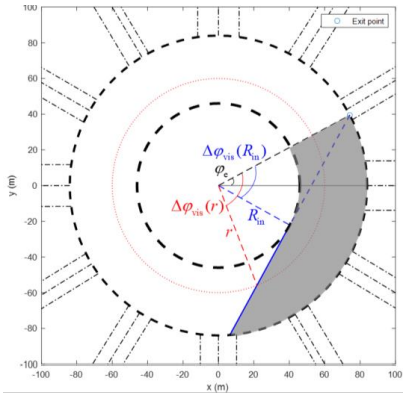
Коридор OD — это часть поверхности кольцевой развязки, по которой разрешено движение транспортных средств с соответствующим OD. Ввиду большого количества пар OD на больших кольцевых развязках разумно автоматически устанавливать соответствующие коридоры, соответствующие установленным правилам, которые близки к решениям водителя-человека. Такие коридоры могут помочь смягчить конфликты между транспортными средствами на кольцевой развязке и улучшить транспортный поток. Например, если пункт назначения транспортного средства находится близко к его въездной ветке, кажется логичным избегать движения близко к внутренней границе кольцевой развязки, что подвергнет транспортное средство опасному и затрудняющему квазиперпендикулярному движению. Внешняя граница кольцевой развязки считается внешней границей всех коридоров OD, как показано на рис. 5. И наоборот, для достижения лучшего использования инфраструктуры проводится более уместное определение внутренних границ коридоров. Во-первых, мы классифицируем OD на два типа: (1) пункт назначения виден из исходной точки (рис. 5(a)); и (2) пункт назначения не виден из исходной точки (рис. 5(б)).
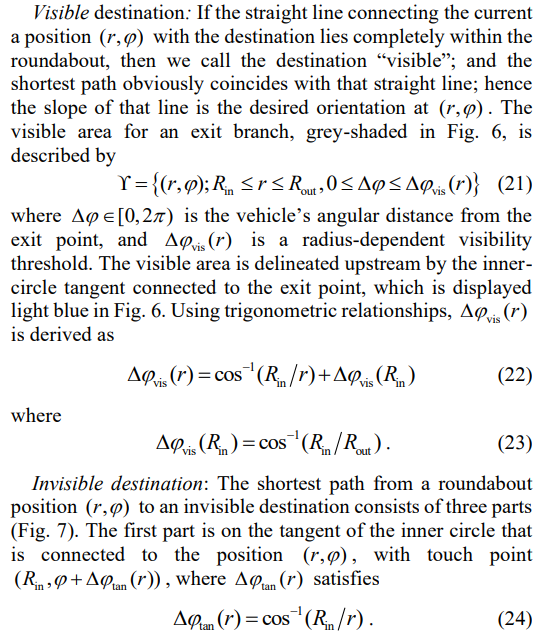
Видимый пункт назначения:Для первого типа пар OD, где отправная точка и пункт назначения находятся относительно близко друг к другу, а пункт назначения виден из отправной точки, кратчайший и самый простой способ добраться туда — это выбрать прямой путь в непосредственной близости от или на внешней границе кольцевой развязки, избегая выездов на внутреннюю часть кольцевой развязки. В этом смысле простым выбором является рассмотрение прямой линии, соединяющей самую левую точку ответвления отправной точки с самой левой точкой ответвления назначения, в качестве внутренней границы коридора, см. рис. 5(a). Если такой коридор слишком узкий для определенного OD, внутренняя граница может быть заменена дугой. В случае кольцевой развязки Place Charles de Gaulle пункт назначения виден из отправной точки, если он находится на расстоянии до 3 ответвлений от отправной точки. Если ответвление выхода находится сразу после ответвления входа, для внутренней границы используется второй вариант (дуга вместо линии).
B. Указание желаемых ориентаций
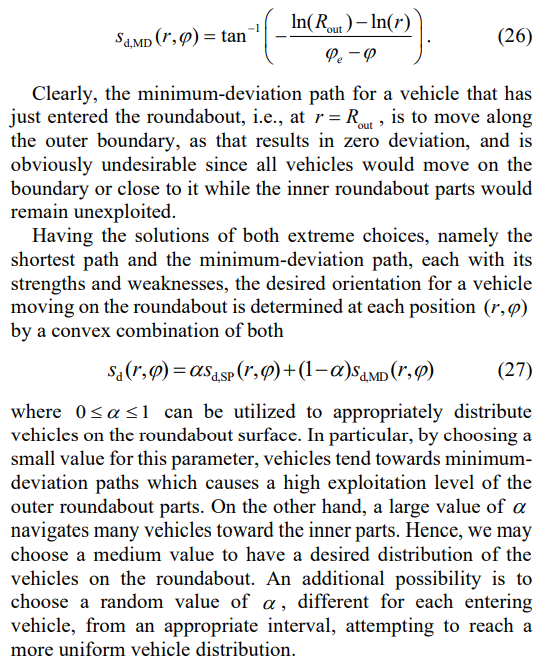
Транспортное средство должно иметь некоторые указания относительно направления своего движения при движении в пределах своего коридора OD, чтобы оно сначала вливалось в кольцевой транспорт, затем продвигалось к месту назначения и в конечном итоге съезжало. Эти указания предоставляются в форме желаемых ориентаций для транспортного средства, которые вычисляются на основе текущего положения транспортного средства и его места назначения и подаются в NLFC для влияния на решения о движении транспортного средства. Таким образом, при отсутствии других транспортных средств транспортное средство будет следовать по пути, заданному желаемыми ориентациями, зависящими от положения, к своему выезду. При наличии других транспортных средств транспортному средству, возможно, придется отклониться от этого пути, например, чтобы избежать столкновения с другими транспортными средствами, но оно всегда будет иметь желаемую ориентацию, соответствующую его текущему положению.
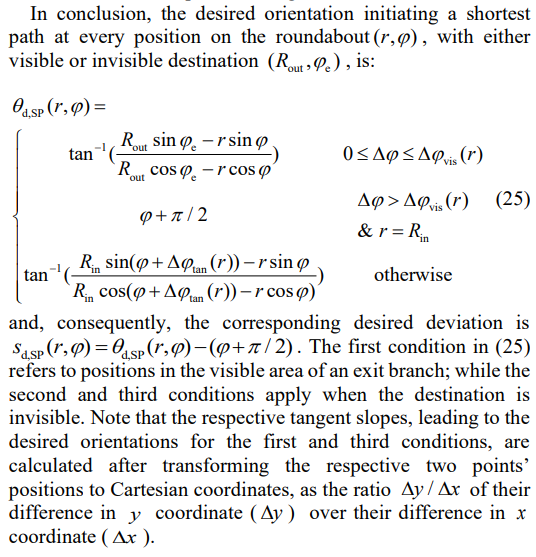
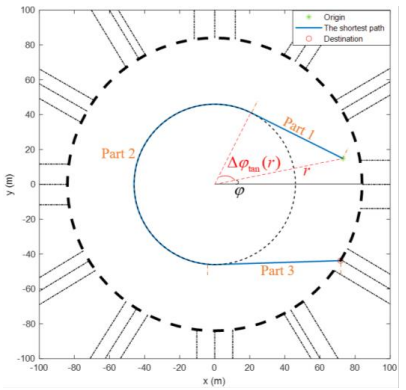
В этой работе мы используем средневзвешенное значение двух ориентаций, которые являются соответствующими оптимальными решениями задачи кратчайшего пути к месту назначения; и минимальное отклонение от задачи кругового движения, подробности см. в [35]. Задача кратчайшего пути: кратчайший путь, соединяющий любую кольцевую развязку с определенным местом назначения, имеет ясный физический смысл; транспортное средство, при отсутствии других транспортных средств, будет заинтересовано в движении по кратчайшему пути к месту назначения. Однако следует отметить, что такой путь может включать в себя сильные отклонения от кругового угла, которые при наличии других транспортных средств увеличивают конфликты с вращающимися транспортными средствами, вызывая увеличение задержек и риска столкновений. Ориентации кратчайшего пути легко выводятся путем различения двух случаев:
Желаемая ориентация в этой части — наклон касательной. Во второй части путь следует внутренней границе, т. е. желаемая ориентация — круговой угол, пока пункт назначения не станет видимым; после чего мы снова имеем случай видимого пункта назначения, а желаемая ориентация — наклон линии, соединенной с точкой выхода, см. рис. 7.
Задача о минимальном отклонении:Путь, соединяющий любую позицию на кольцевой развязке с пунктом назначения с минимальным отклонением от кругового движения, интересен, поскольку большинство транспортных средств вращаются, и если их ориентация близка к круговому углу, то они близки друг к другу, что смягчает конфликты транспортных средств и силу любых требуемых маневров по предотвращению столкновений. В [35] полученное решение задачи оптимального управления показывает, что отклонения от кругового угла минимизируются, если транспортное средство сохраняет постоянное отклонение на своем пути от любого положения до пункта назначения, и это постоянное отклонение равно
Эта статьядоступно на arxivпо лицензии CC 4.0.
Оригинал
🔥 Популярное на этой неделе
-
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27303)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Экономика и финансы (107)
- Социальные медиа и интернет-культура (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)