

Интеграция пограничного контроля и мер безопасности в системы безполосного движения
2 сентября 2024 г.Авторы:
(1) Мехди Надери;
(2) Маркос Папагеоргиу;
(3) Димитриос Труллинос;
(4) Яссон Карафиллис;
(5) Иоаннис Папамихаил.
Таблица ссылок
Аннотация и введение
Моделирование транспортных средств
Нелинейное управление с обратной связью
Коридоры OD и желаемые ориентации
Контролеры границ и безопасности
Результаты моделирования
Заключение
Приложение A: Обнаружение столкновений
Приложение B: Трансформированные кривые ISO-расстояния
Приложение C: Локальная плотность
Приложение D: Подробная информация о контроллере безопасности
Приложение E: Параметры контроллера
Ссылки
V. КОНТРОЛИРУЮЩИЕ ПОГРАНИЧНОГО И БЕЗОПАСНОГО КОНТРОЛЯ
A. Контроллеры боковых границ
Обеспечение того, чтобы транспортное средство не выехало за пределы дороги, имеет большее значение в условиях безполосного движения, чем в условиях с полосами, где транспортные средства стремятся двигаться посередине каждой полосы, что значительно снижает риск съезда с дороги. Кроме того, в условиях плотного движения безполосного движения полезно, чтобы некоторые транспортные средства двигались точно по (левой или правой) границе дороги, конечно, никогда не нарушая ее, поскольку это повышает уровень эксплуатации доступной ширины дороги. Обратите внимание, что контролеры границ также используются для коридоров Раздела IV, границы которых также должны соблюдаться, даже если они не совпадают с границами дороги.
Для этого мы развертываем два контроллера границ, по одному для каждой стороны дороги или коридора, которые обеспечивают верхний и нижний пределы для угла поворота рулевого колеса, генерируемого NLFC транспортного средства. Транспортное средство движется в соответствии с NLFC, если такая граница не активирована; если одна из границ постоянно активирована, транспортное средство асимптотически направляется, действием соответствующего контроллера границ, к соответствующей границе дороги и продолжает движение точно по границе дороги до тех пор, пока угол поворота рулевого колеса, создаваемый NLFC, активирует эту границу, например, из-за бокового подталкивания другими транспортными средствами. Контроллер границ сначала разработан для обработки прямой границы дороги; и в конечном итоге адаптирован также для учета круговых и наклонных траекторий.
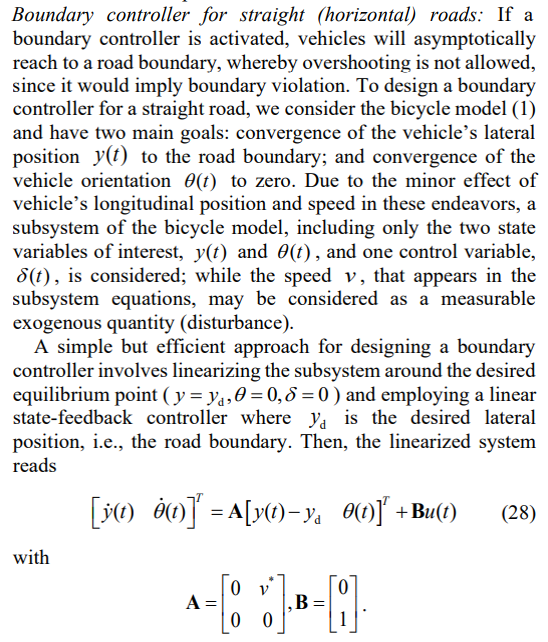
Тогда для подсистемы может быть разработан следующий линейный контроллер с обратной связью по состоянию:

где K — коэффициент усиления обратной связи, который можно легко вычислить, чтобы получить действительные и отрицательные собственные значения замкнутого контура, обеспечивающие асимптотическую сходимость переменных состояния к их желаемым значениям.
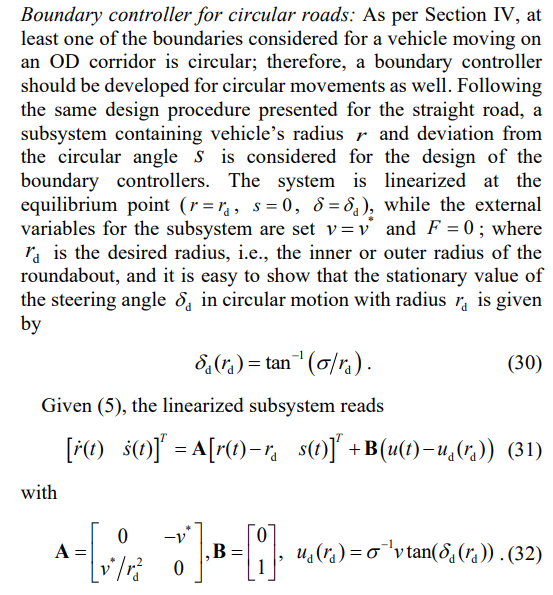
Тогда, учитывая (2), (31) и (32), контроллер будет

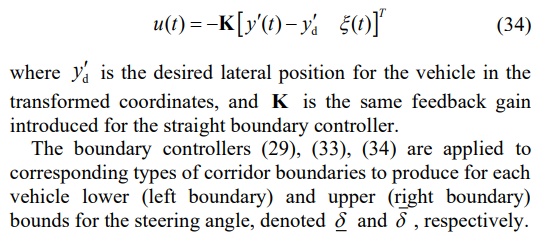
Контроллер границ для неровных траекторий.Для асимметричных границ соответствующая модель была представлена в разделе II.C, а контроллер асимметричных границ имеет вид
B. Контроллер продольной безопасности
Поскольку в исходные NLFC были внесены некоторые изменения, такие как различные желаемые ориентации, практические ограничения для ускорения и угла поворота рулевого колеса, а также дискретная реализация времени, функции исходных контроллеров, например, предотвращение столкновений, больше не могут быть строго гарантированы. Следовательно, столкновения транспортных средств могут происходить в некоторых редких тяжелых обстоятельствах. Чтобы предотвратить такие ситуации, мы разрабатываем контроллер безопасности, имитирующий поведение водителя-человека, генерирующий безопасный верхний предел для ускорения транспортного средства.
Общая процедура заключается в следующем:
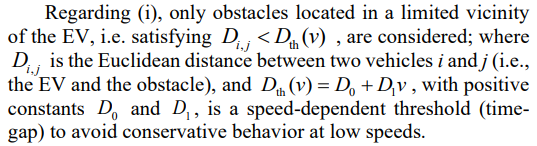
(i) Рассмотрите препятствия в непосредственной близости от эго-транспортного средства (ЭМ).
(ii) Оцените возможное положение конфликта для каждого препятствия.
(iii) Выберите конфликтную позицию с кратчайшим евклидовым расстоянием до EV.
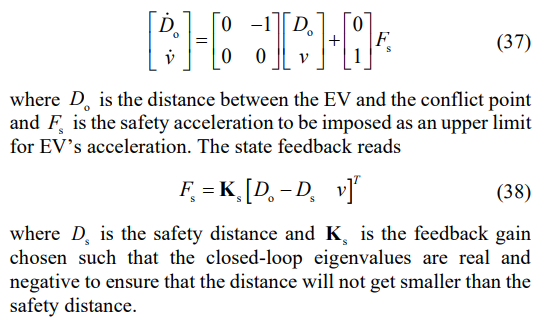
(iv) Пусть линейный контроллер с обратной связью по состоянию определяет безопасный верхний предел ускорения электромобиля, чтобы гарантировать отсутствие столкновения.
Что касается (ii), выполняется грубое прогнозирование краткосрочного будущего пути ЭМ и каждого препятствия для прогнозирования возможного конфликта, т. е. пересечения их путей. Для этого мы классифицируем каждое движение транспортного средства на круговые или перекошенные типы на основе значения его желаемой ориентации. В частности, если желаемое отклонение от кругового угла меньше порогового значения, например, 10, движение классифицируется как круговое, что означает, что транспортное средство будет двигаться по своему текущему радиусу. В противном случае движение классифицируется как перекошенное, т. е. транспортное средство будет двигаться вдоль своей желаемой ориентации. После этой классификации определяются точки пересечения будущих путей ЭМ и каждого препятствия на основе четырех возможных комбинаций понятий:
И EV, и препятствие имеют круговые движения:В этом состоянии потенциальная точка пересечения отсутствует, поскольку оба транспортных средства движутся параллельно.
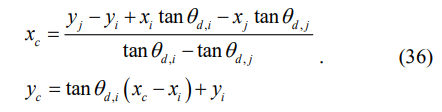
И EV, и препятствие имеют асимметричные движения:В этом случае единственная точка пересечения рассчитывается путем пересечения двух уравнений движения транспортного средства:

Тогда, если их желаемые ориентации не идентичны (в этом случае их пути не пересекаются), точка пересечения будет
Если точка пересечения находится за пределами кольцевой развязки или позади EV или препятствия в перекошенных координатах, выровненных с желаемой ориентацией EV, она игнорируется. В противном случае она рассматривается как кандидат на ближайшую точку пересечения.
EV и препятствие имеют круговые и наклонные движения соответственно: В этом состоянии вычисление возможной точки пересечения немного более подробно и приведено в Приложении D. EV и препятствие имеют наклонные и наклонные движения соответственно: Спецификацию точки пересечения см. в Приложении D.
Кроме того, определяется ближайшее препятствие, расположенное в узком коридоре вокруг предполагаемого будущего пути эго-транспортного средства (подробности см. в Приложении D), и его текущее положение рассматривается как возможное место конфликта.
Что касается (iii), среди всех предполагаемых точек пересечения и ближайшего препятствия перед электромобилем, ближайшая из них принимается в качестве конфликтной точки, до которой электромобиль должен поддерживать безопасную дистанцию с помощью контроллера безопасности.
Наконец, в отношении (iv) разработан контроллер безопасности, учитывающий простую динамику двойного интегратора для отражения приближения электромобиля к точке конфликта.
Подводя итог, структура общей предлагаемой стратегии управления, включая нелинейные, граничные и безопасные контроллеры, представлена на рис. 8.
Эта статьядоступно на arxivпо лицензии CC 4.0.
Оригинал
🔥 Популярное на этой неделе
-
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г. -
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27222)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Экономика и финансы (107)
- Социальные медиа и интернет-культура (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)