
Эмпирическая оценка модели IFRP-T2P с использованием набора данных Kitti360
16 июля 2025 г.Таблица ссылок
Аннотация и 1. Введение
Связанная работа
Метод
3.1 Обзор нашего метода
3.2 грубое извлечение текстовых клеток
3.3 Оценка прекрасной позиции
3.4 Цели обучения
Эксперименты
4.1 Описание набора данных и 4.2 Подробная информация
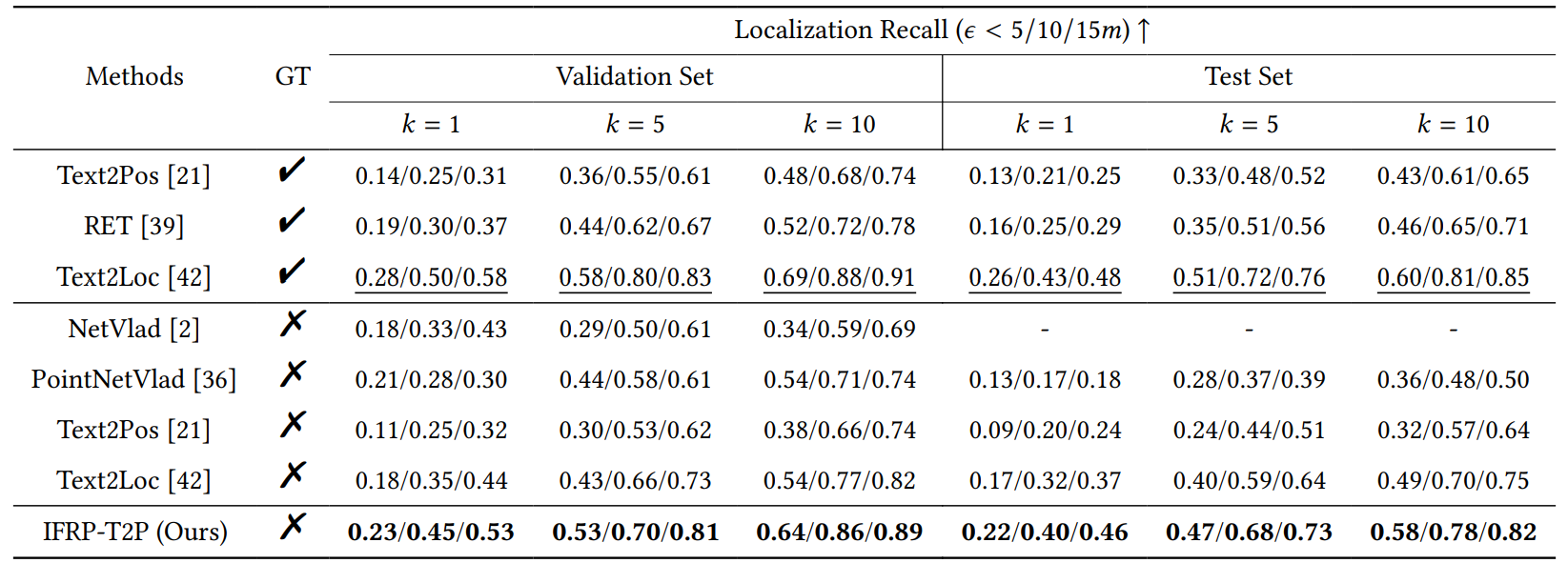
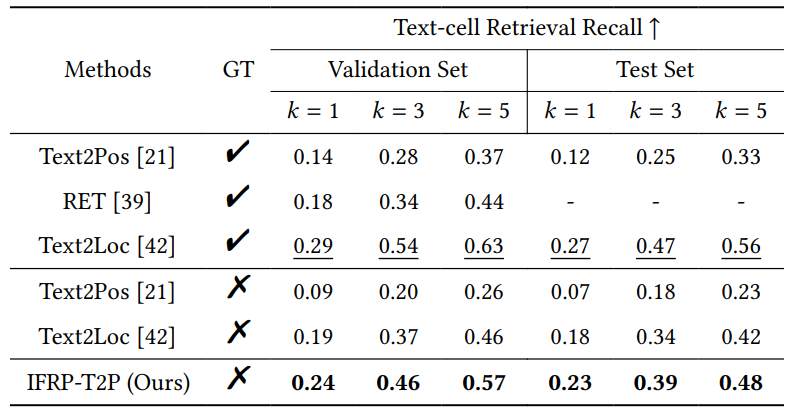
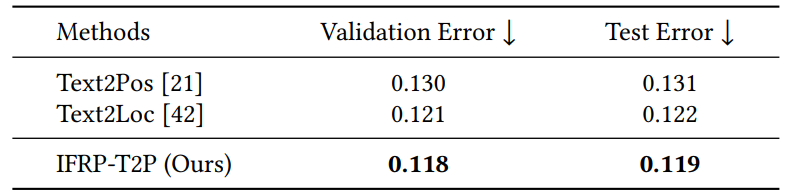
4.3 Критерии оценки и 4.4 результаты
Анализ производительности
5.1 Исследование абляции
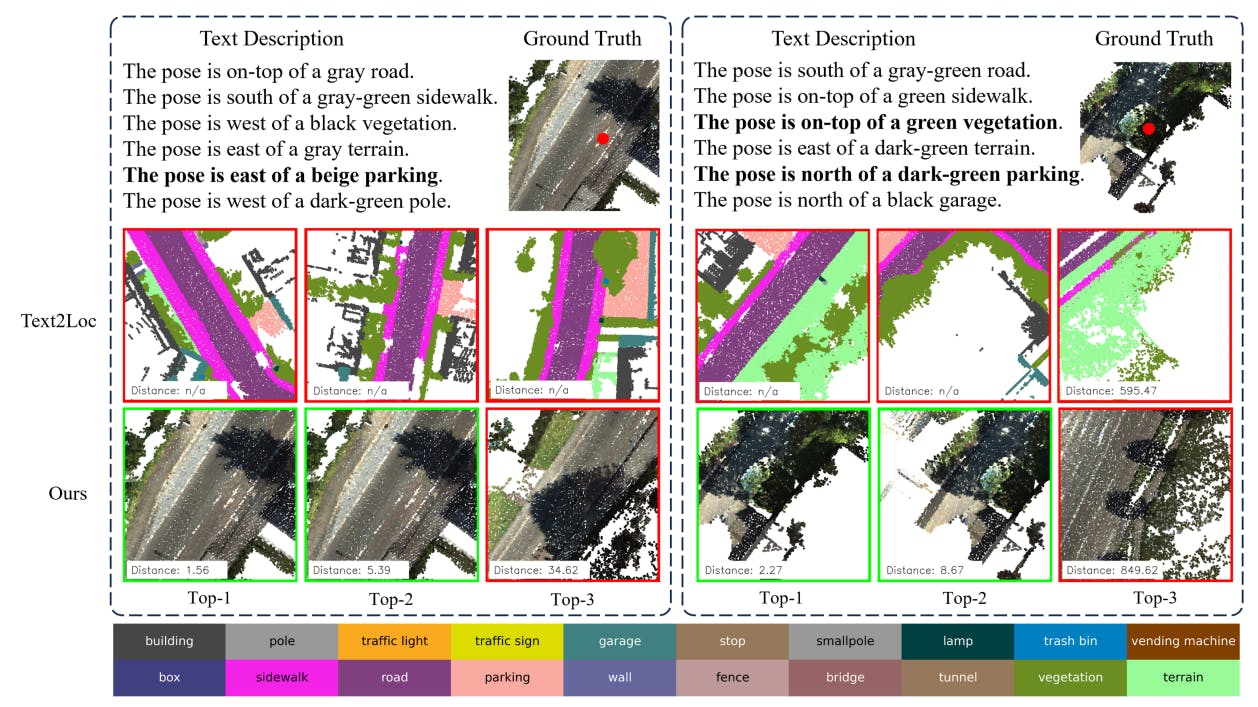
5.2 Качественный анализ
5.3 Анализ встраивания текста
Заключение и ссылки
Дополнительный материал
- Подробная информация о наборе данных Kitti360
- Больше экспериментов по экстрактору запроса экземпляра
- Анализ космического пространства текстовых клеток
- Больше результатов визуализации
- Анализ устойчивости точек
Анонимные авторы
- Подробная информация о наборе данных Kitti360
- Больше экспериментов по экстрактору запроса экземпляра
- Анализ космического пространства текстовых клеток
- Больше результатов визуализации
- Point Cloud Robustness Analysis
4 эксперименты
4.1 Описание набора данных
Мы оцениваем нашу модель IFRP-T2P в наборе данных Kitti360 [21]. Этот набор данных охватывает сцены облака 3D-точек из девяти городских районов, охватывающих городское пространство 15,51 квадратных километров и состоят из 43 381 парных описаний и позиций. Мы используем пять областей для нашего обучения и одна для проверки. Оставшиеся три области используются для тестирования. Каждая трехмерная ячейка в этом наборе данных представлена кубиком, размером 30 метров с каждой стороны, с 10-метровой шагом между каждой ячейкой. Более подробная информация предоставляется в дополнительном материале.
4.2 Детали реализации
Наш подход начинается с предварительного обучения экстрактора запроса экземпляра. Это достигается с помощью объектива сегментации экземпляра, как указано в разделе 3.2. В нашем магистрали функции используется разреженная свертка U-Net, в частности, Minkowski Res16unet34c [10] с 0,15-метровым размером вокселя. Чтобы соответствовать требованиям конфигурации Kitti360, мы используем облака ячейки, каждый из которых охватывает 30 -метровое кубическое пространство в качестве нашего ввода. Обучение простирается более 300 эпох, используя оптимизатор Adamw. На грубой стадии мы тренируем модель поиска текстовых клеток с Adamw Optimizer с уровнем обучения 1E-3. Модель обучена в общей сложности 24 эпоха, а скорость обучения разрушается 10 в
12-я эпоха. На прекрасном этапе мы обучаем регрессионную модель с Adam Optimizer с уровнем обучения 3E-4 для 12 эпох.
Авторы:
(1) Lichao Wang, FNII, Cuhksz (wanglichao1999@outlook.com);
(2) Zhihao Yuan, FNII и SSE, Cuhksz (zhihaoyuan@link.cuhk.edu.cn);
(3) Jinke Ren, FNII и SSE, Cuhksz (jinkeren@cuhk.edu.cn);
(4) Shuguang Cui, SSE и FNII, Cuhksz (shuguangcui@cuhk.edu.cn);
(5) Чжэнь Ли, автор -соответствующий автор из SSE и FNII, Cuhksz (lizhen@cuhk.edu.cn).
Эта статья есть
Оригинал
🔥 Популярное на этой неделе
-
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г. -
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
Лучшие новогодние подарки для владельцев домашних животных
29 мая 2022 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27328)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Экономика и финансы (107)
- Социальные медиа и интернет-культура (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)