

Управление автоматизированными транспортными средствами на больших кольцевых перекрестках без полос движения
2 сентября 2024 г.Авторы:
(1) Мехди Надери;
(2) Маркос Папагеоргиу;
(3) Димитриос Труллинос;
(4) Яссон Карафиллис;
(5) Иоаннис Папамихаил.
Таблица ссылок
Аннотация и введение
Моделирование транспортных средств
Нелинейное управление с обратной связью
Коридоры OD и желаемые ориентации
Контролеры границ и безопасности
Результаты моделирования
Заключение
Приложение A: Обнаружение столкновений
Приложение B: Трансформированные кривые ISO-расстояния
Приложение C: Локальная плотность
Приложение D: Подробная информация о контроллере безопасности
Приложение E: Параметры контроллера
Ссылки
Абстрактный-Управление автоматизированными транспортными средствами на больших кольцевых развязках без полос движения является сложной задачей из-за геометрической сложности и частых конфликтов между въезжающими, вращающимися и выезжающими транспортными средствами. В этой статье предлагается комплексная методология управления транспортными средствами на кольцевой развязке и связанных с ней ответвлениях дороги. Разработанная стратегия движения транспортных средств в реальном времени основана на вычисляемых в автономном режиме широких перекрывающихся коридорах движения, по одному для каждого движения «от начала до места назначения» (OD), которые очерчивают допустимые зоны движения соответствующих транспортных средств OD. Кроме того, зависимые от пространства желаемые ориентации определяются пунктом назначения, чтобы смягчить потенциальные конфликты транспортных средств и сократить расстояние поездки. Распределенная (на транспортное средство) стратегия управления движением, использующая два нелинейных контроллера обратной связи (NLFC) для кругового и прямого движения соответственно, используется для навигации каждого транспортного средства в соответствующем коридоре OD к его пункту назначения, учитывая желаемую ориентацию и избегая столкновений с другими транспортными средствами; в то время как контроллеры границ гарантируют, что границы коридора не будут нарушены, и съезд не будет пропущен. В качестве чрезмерно сложного примера мы рассматриваем знаменитую кольцевую развязку площади Шарля де Голля в Париже, имеющую ширину 38 м и включающую дюжину двунаправленных радиальных улиц, следовательно, в общей сложности 144 OD. Уместность и эффективность представленного метода проверяются с помощью микроскопического моделирования и оценки макроскопических данных.
Индексные термины —автоматизированные транспортные средства, безполосное движение, микроскопическое моделирование, нелинейный контроллер обратной связи
I. ВВЕДЕНИЕ
Для решения проблем, вызванных пробками на дорогах, таких как задержки в пути, ухудшение состояния окружающей среды и снижение безопасности дорожного движения, в последние десятилетия были разработаны и частично использованы различные методы управления дорожным движением [1], [2]. Совсем недавно было разработано большое количество систем автоматизации и связи транспортных средств (VACS), которые значительно улучшают индивидуальные возможности транспортных средств, позволяя создать новое поколение потенциальных инструментов управления дорожным движением [3], [4]. Эта тенденция продолжается с появлением высокоавтоматизированных или почти беспилотных транспортных средств, которые испытываются в реальных условиях дорожного движения, см., например, [5]. В недалеком будущем транспортные средства смогут общаться друг с другом и с инфраструктурой; и двигаться автоматически, основываясь на собственных датчиках, коммуникациях и соответствующих стратегиях управления движением.
Недавно была предложена концепция TrafficFluid, новая парадигма для движения транспортных средств, которая применяется на высоких уровнях автоматизации и коммуникации транспортных средств [6]. Концепция TrafficFluid основана на двух комбинированных принципах: (a) движение без полос, при котором транспортные средства не привязаны к фиксированным полосам движения, как в обычном движении, а могут двигаться в любом месте на двухмерной поверхности дороги; и (b) подталкивание транспортных средств, при котором транспортные средства сообщают о своем присутствии другим транспортным средствам перед ними (или ощущаются ими), и это может влиять на движение транспортных средств впереди. За последние пару лет было предложено несколько стратегий движения для автономных транспортных средств на инфраструктуре без полос в рамках парадигмы TrafficFluid с использованием различных методологий, включая: специальные стратегии [6], [7], оптимальное управление [8], [9], обучение с подкреплением [10], нелинейное управление с обратной связью [11], [12]; также была разработана общая среда моделирования для движения без полос [13]; см. [14] для краткого обзора.
В замечательном докладе [15] Люк Жюлиа упомянул две причины, по которым беспилотные автомобили никогда не станут реальностью, одна из них — запутанная кольцевая развязка на площади Шарля де Голля в Париже, изображенная на рис. 1, которая слишком сложна для навигации автоматизированных транспортных средств (AV). Эта знаменитая кольцевая развязка имеет ширину 38 м, внешний радиус 84 м и внутренний радиус 46 м. Она включает в себя дюжину двунаправленных радиальных улиц, т. е. 144 отдельных движения «от начала до назначения» (OD) для транспортных средств. Учитывая эту сложность, эта дорожная инфраструктура работает без полос; поэтому, оказавшись на кольцевой развязке, водители-люди должны найти свой путь, не придерживаясь каких-либо полос движения. Заявление Люка Жюлиа побудило нас заняться решением этой проблемы и рассмотреть кольцевую развязку на площади Шарля де Голля, которая в любом случае представляет собой инфраструктуру без полос движения, в качестве примера для концепции TrafficFluid, т. е. для разработки стратегии движения беспилотных транспортных средств, которые могут заполнять и проезжать по таким сложным кольцевым развязкам, как описано в этой статье.
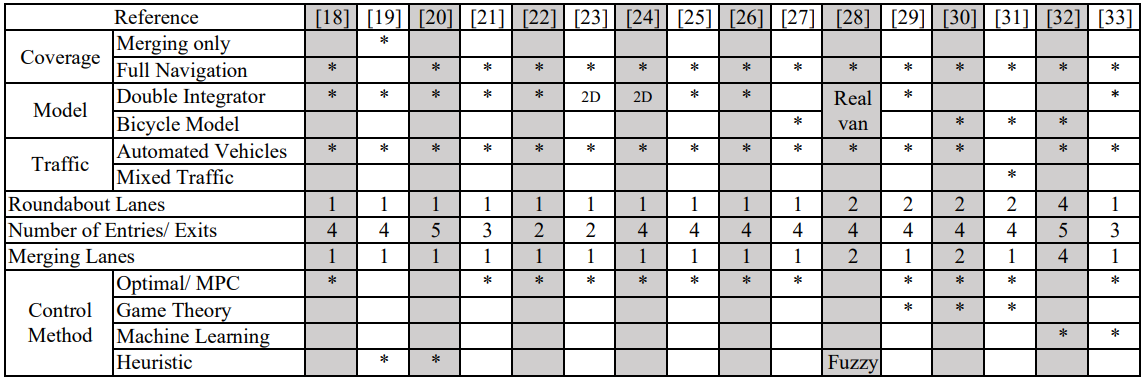
Круговые развязки являются ключевым элементом городского движения, позволяя более эффективному потоку при слабом трафике [17]; но могут стать узким местом при более высоких требованиях. Таким образом, успешное управление круговыми развязками, которое считается сложным из-за их сложности, может улучшить поток движения в прилегающей области. В литературе есть несколько работ, которые фокусируются на вождении беспилотных автомобилей на круговых развязках [18]-[33]. Классификация существующих методов, основанная на некоторых важных характеристиках, выглядит следующим образом:
![Fig.1. Place Charles de Gaulle roundabout [16]](https://cdn.hackernoon.com/images/fWZa4tUiBGemnqQfBGgCPf9594N2-n783zrf.png)
приведено в Таблице I. Большинство представленных работ, по-видимому, сосредоточены на простых кольцевых перекрестках, которые не приближаются по сложности к исследованию случая в этой статье. В частности, большинство из них сосредоточены на одно- или двухполосных кольцевых перекрестках с ограниченным количеством радиальных улиц.
Предварительный отчет о ранних результатах на кольцевых перекрестках без полос, включающий схему управления для AV и применение к кольцевой развязке на площади Шарля де Голля (Париж), был представлен в [34]. В нем нелинейный контроллер с обратной связью, разработанный в [11] для транспортных средств, движущихся по прямым дорогам без полос, использовался для управления транспортными средствами на кольцевой развязке. Кроме того, в [35] мы разработали оптимальный подход к управлению, минимизирующий взвешенную сумму расстояния поездки и отклонения от кругового движения для определения желаемых ориентаций на больших кольцевых развязках, чтобы заменить эвристический метод, используемый в [34].
В этой статье мы расширяем и улучшаем стратегии, представленные в [34], во многих существенных аспектах для обеспечения безопасного и удобного движения транспортных средств, а также приемлемой пропускной способности, особенно в ситуациях с высокой плотностью. Во-первых, новый нелинейный контроллер, разработанный для кольцевых дорог в [12], используется для управления транспортными средствами при движении по кольцевой развязке, что более целесообразно, чем модификация контроллера прямой дороги, как это сделано в [34]. Во-вторых, субоптимальный онлайн-подход, представленный в [35], используется для определения желаемых ориентаций транспортных средств. Кроме того, вводятся некоторые дополнительные соображения, такие как адаптивная желаемая скорость на основе локальной плотности, а также продольный контроллер безопасности.
для обеспечения: (i) подходящей производительности в условиях большого скопления людей; и (ii) хорошей эксплуатации инфраструктуры и высокой пропускной способности на всех уровнях плотности. При разработке стратегии движения мы по частям пытались представить себе логические человеческие решения и следовали им, если они оказывались эффективными. Видео микроскопического моделирования для кольцевой развязки имени Шарля де Голля с использованием представленного подхода доступно по адресу https://bit.ly/36exR42. Наконец, макроскопические данные используются для оценки эффективности представленной методологии на уровне трафика.
Остальная часть статьи выглядит следующим образом. Раздел II объясняет динамику транспортного средства и преобразования для круговых и косых движений. Нелинейные контроллеры, используемые для прямых и круговых траекторий, представлены в Разделе III. Раздел IV описывает спроектированные коридоры OD и желаемый подход к ориентации. Контроллеры границ и безопасности представлены в Разделе V. Результаты моделирования представлены в Разделе VI. Заключительные замечания приведены в Разделе VII. Некоторые подробности побочных вопросов приведены в четырех Приложениях.
Эта статьядоступно на arxivпо лицензии CC 4.0.
Оригинал
🔥 Популярное на этой неделе
-
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г.
⭐ Самое популярное
-
Marvel’s Wolverine: все, что мы знаем об эксклюзиве для PS5 на данный момент
31 марта 2023 г. -
Новые фильмы 2023 года: самые крупные предстоящие релизы скоро появятся в кинотеатрах
7 декабря 2022 г. -
8 проектов с открытым исходным кодом, которые помогут вашему бизнесу работать эффективно
6 апреля 2022 г. -
Новые фильмы Netflix 2023 года: самые большие оригинальные фильмы, выходящие на стример
28 декабря 2022 г. -
Новое обновление Xbox Series X только что вышло и может сэкономить вам деньги
12 января 2023 г.
Categories
- Технологии и IT (27242)
- Игры, развлечения и хобби (4775)
- Искусственный интеллект и будущее (294)
- Бизнес и предпринимательство (273)
- Общество и культура (244)
- Дизайн и креатив (202)
- Социальные медиа и интернет-культура (107)
- Экономика и финансы (107)
- Наука и исследования (74)
- Спорт и здоровье (55)
- Психология и саморазвитие (50)
- Образование и обучение (20)
- Маркетинг и реклама (17)
- Путешествия и lifestyle (6)