
Объяснимый ИИ (XAI) для более безопасного, умного дистанционного зондирования
12 июня 2025 г.Таблица ссылок
- Аннотация и введение
- Фон
- Тип данных датчика дистанционного зондирования
- Clarkmark Demote Sensing Dataets для оценки моделей обучения
- Метрики оценки для нескольких ударов дистанционного зондирования
- Недавние методы обучения в дистанционном зондировании
- Обнаружение и сегментация объекта на основе нескольких выстрелов в дистанционном зондировании
- Обсуждения
- Численные эксперименты нескольких выстрелов в наборе данных на основе БПЛА
- Объяснимый ИИ (XAI) в дистанционном зондировании
- Выводы и будущие направления
- Благодарности, декларации и ссылки
10 Объясняемый ИИ (XAI) в дистанционном зондировании
XAI становится все более важной областью исследований и разработок в области дистанционного зондирования. Поскольку глубокое обучение и другие сложные модели черного ящика получают популярность для анализа данных дистанционного зондирования, существует растущая необходимость для предоставления прозрачных и понятных объяснений того, как эти модели достигают их прогнозов и решений. В рамках удаленного зондирования объясняемость приобретает повышенное значение, поскольку выходы моделей часто напрямую информируют реальные действия с основными последствиями. Например, модели, идентифицирующие области риска для стихийных бедствий, загрязнения или вспышек заболеваний, могут двигаться
![Table 10 The mean classification accuracy using the 5-way 1-shot and 5-way 5-shot learning evaluation on UC-Merced. The Siamese, Triplet, SimpleShot, MTL, TADAM and Label Hallucination were ran for 10 times per setting, while for the remaining methods, the values were obtained from [69].](https://cdn.hackernoon.com/images/null-jk034nn.png)
Эвакуации, усилия по восстановлению и вмешательства общественного здравоохранения. Если рассуждения, лежащие в основе этих выходов моделей, неясны, заинтересованные стороны с меньшей вероятностью будут доверять и действовать по рекомендациям модели.
Чтобы решить эти проблемы, методы XAI в дистанционном зондировании стремятся пролить свет внутри черного ящика [134]. Пояснения могут подчеркнуть, какие входные функции и шаблоны приводят к конкретным выходам модели [135]. Визуализация может проиллюстрировать пошаговую логику модели [136]. Оценки неопределенности могут передать, когда модель может быть неверной или ненадежной [137]. Прототипы и тематические исследования показали перспективу для повышения доверия и принятия моделей искусственного интеллекта для приложений дистанционного зондирования, начиная от мониторинга климата до точности сельского хозяйства [138]. Поскольку удаленные датчики продолжают производить постоянно более высокие и более сложные наборы данных, роль XAI, вероятно, будет продолжать расти. Благодаря продуманным реализациям XAI разработчики могут позволить моделям глубокого обучения не только делать точные прогнозы из данных удаленного зондирования, но и обеспечивать прозрачность и обоснования, необходимые для заинтересованных сторон, чтобы уверенно использовать эти инструменты для критического принятия решений в реальном мире. Недавние подходы к XAI в области дистанционного зондирования описаны ниже.
Одним из заметных разработок является метод «Что я знаю» (WIK), который проверяет надежность моделей глубокого обучения, предоставляя примеры аналогичных случаев из набора учебных данных для объяснения каждого нового вывода [139]. Этот метод демонстрирует, как модель достигла своих прогнозов.
XAI также был применен для отслеживания распространения инфекционных заболеваний, таких как COVID-19 с использованием данных удаленного зондирования [140]. Объясняя модели прогнозирования заболеваний, XAI обеспечивает большее доверие и прозрачность. Кроме того, методы XAI использовались для мониторинга адаптации климата в умных городах, где спутниковые снимки помогают извлекать индикаторы землепользования и изменений окружающей среды [141].
Несколько конкретных методов XAI демонстрируют перспективу для задач удаленного зондирования, включая локальные интерпретируемые модель-алкогольные объяснения (LIME), аддитивные объяснения Шапли (SHAP) и градиент-взвешенное картирование активации класса (Grad-CAM) [139]. Эти методы выделяют влиятельные входные функции и области изображений, которые привели к выходам модели. Grad-Cam производит визуальные тепловые карты, чтобы указать критические области при входном изображении для каждого вывода, сделанного сверточной нейронной сетью.
Тем не менее, некоторые проблемы остаются в полной интеграции XAI в рамки дистанционного зондирования. Существуют практические трудности при сборе помеченных учебных данных, извлечение значимых функций, выборы соответствующих моделей, обеспечение обобщения и воспроизводимых и обслуживаемых систем здания [141]. Существуют также неопределенность в моделировании сложных научных процессов, таких как изменение климата, которые ограничивают интерпретируемость прогнозов модели [141]. Кроме того, типы объяснений, предоставленных современными методами XAI, не всегда соответствуют человеческим способам рассуждения и объяснения [142]. Несмотря на проблемы, методы XAI имеют перспективу для улучшения подходов к небольшим выстрелу в дистанционном зондировании. Несколько выстрелов обучают, чтобы выучить новые концепции из очень немногих маркированных примеров, что важно в дистанционном зондировании, где помеченные данные мало в разнообразии типов земного покрова. Тем не менее, сложность нескольких выстрелов моделей обучения затрудняет интерпретацию их прогнозов.
10.1 XAI в нескольких выстрелах для дистанционного зондирования
Большинство методов XAI для задач классификации являются постсоотрованными, которые не могут быть включены в структуру модели во время обучения. Распространение [143–146] и методы, основанные на возмущениях [147], обычно используются в XAI для классификационных задач. Тем не менее, на XAI было выполнено несколько работ для нескольких выстрелов. Первоначальная работа изучала такие методы, как карты внимания и визуализация функций, чтобы дать представление о нескольких прогнозах моделей моделей для задач дистанционного зондирования [148]. Недавно был предложен новый тип XAI, называемый Scouter [149], в котором к классификатору применяется механизм самоуправления. Этот метод извлекает дискриминантные внимания для каждой категории на этапе обучения, что позволяет объяснить результаты классификации. Такие методы могут дать ценную информацию о процессе принятия решений моделей нескольких выстрелов, повышения прозрачности и подотчетности, что особенно важно при удаленном зондировании из-за высокой стоимости получения и обработки данных дистанционного зондирования. В другой недавней работе [150] был предложен новый подход к нескольким выстрелам для классификации изображений, который использует визуальные представления из модели основы и веса, генерируемые объяснимым классификатором. Минимальное количество различимых функций включается в взвешенные представления, а визуализированные веса обеспечивают информативный намек на процесс обучения с несколькими выстрелами. Наконец, дискриминатор сравнивает представления каждой пары изображений в наборе поддержки и запросов, и пары, дающие самые высокие оценки, определяли результаты классификации. Этот подход, применяемый к трем основным наборам данных, достиг хорошей точности и удовлетворительной объяснения.
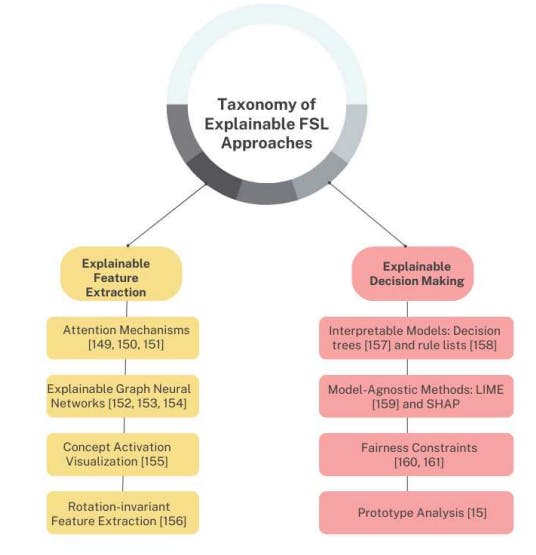
10.2 Таксономия объяснимых подходов к обучению с несколькими выстрелами
Объяснимые методы обучения для дистанционного зондирования могут быть классифицированы по двум основным измерениям:
10.2.1 Объяснимая извлечение признаков
Эти методы направлены на то, чтобы выделить влиятельные функции или входы, которые стимулируют прогнозы модели.
• Механизмы внимания: Слои внимания акцентируют информативные особенности и входы, присваивая специфические для контекста веса релевантности [151]. Они производят карты активации, визуализирующие влиятельные области [150, 152]. Тем не менее, они не объясняют общий процесс рассуждения.
• Объяснимые графические нейронные сети: такие методы, как XGNNS [153, 154], могут идентифицировать важные узлы и отношения в данных структурированных графиками. [155] выдвигает внимательные к модулям нейронной сети графиков, которые могут предоставить визуальные и текстовые объяснения, иллюстрирующие, какие функции наиболее важны для меньшего количества обучения. Это обеспечивает прозрачность уровня функций. Но полная логика остается неясной.
• Визуализация активации концепции: такие подходы, как выпускная камея, создают карты значимости, показывающие влиятельные области входных изображений [156]. Но важность локальной функции может не полностью представлять глобальный процесс принятия решений.
• Извлечение инвариантов ротации: предлагаемая структура извлечения инвариантов вращения в [157] вводит интерпретируемый подход для извлечения особенностей, инвариантных в вращения. Это обеспечивает внутренние визуальные свойства, а не посторонние изменения вращения.
10.2.2 Объяснимое принятие решений
Эти методы направлены на то, чтобы непосредственно выяснить внутреннюю логику и рассуждения модели.
• Интерпретируемые модели: деревья решений [158] и списки правил [159] обеспечивают полную прозрачность в логику модели в упрощенном человеческом формате. Однако точность часто ниже, чем сложные модели.
• Модельные методы: методы: такие методы, как извести [160] и аппроксимальные сложные модели локально с использованием интерпретируемых представлений. Но генерирование объяснений может быть медленным во время прогноза.
• Справедливые ограничения: навязывая ограничения справедливости во время обучения [161] или преобразования данных в справедливые представления [162], можно смягчить смещения. Однако ограничения могут чрезмерно ограничивать полезные закономерности.
• Анализ прототипа: анализ прототипических примеров из каждого класса обеспечивает интуицию в рассуждения модели [15]. Но ограничено более простыми моделями на основе экземпляров.
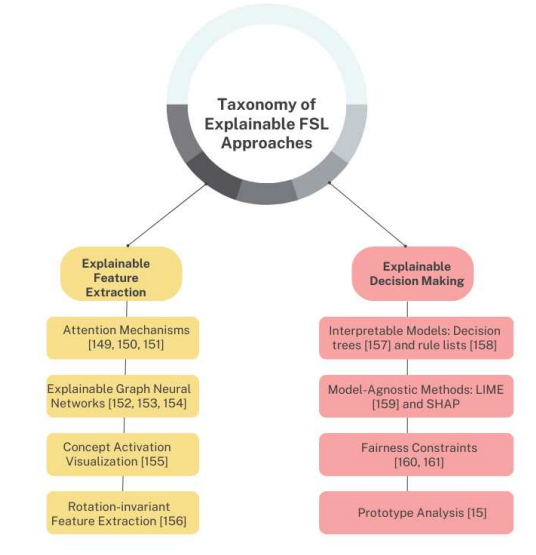
В целом, выбор подходящих объяснимых методов обучения требует торговли от точности, прозрачности и эффективности на основе требований и ограничений применения. Комбинация методов объяснения функций и решений часто необходима для полной интерпретации. Таксономия предоставляет первоначальное руководство по навигации по этому сложному ландшафту подходов в контекстах дистанционного зондирования. Для ясности таксономия также показана на рисунке 8.
Авторы:
(1) Гао Ю Ли, Школа электротехники и электронных инженеров, Нанянг Технологический университет, 50 Нанянг -авеню, 639798, Сингапур (Gaoyu001@e.ntu.edu.sg);
(2) Плотина Танмой, Школа машиностроения и аэрокосмической инженерии, Технологический университет Наняна, 65 Нанянг Драйв, 637460, Сингапур и Департамент компьютерных наук, Университет Нью -Орлеана, Новый Орлеан, 2000 Лейкшор Драйв, LA 70148, США (США (США.tanmoy.dam@ntu.edu.sg);
(3) MD Meftahul Ferdaus, Школа электротехники и электронного инженера, Нанянг Технологический университет, 50 Nanyang Ave, 639798, Сингапур (mferdaus@uno.edu);
(4) Даниэль Пуйу Понар, Школа электротехники и электронных инженеров, Технологический университет Наняна, пр. Наняна, 639798, Сингапур (Epdpuiu@ntu.edu.sg);
(5) Vu N. Duong, Школа машиностроения и аэрокосмической инженерии, Nanyang Technological University, 65 Nanyang Drive, 637460, Сингапур (vu.duong@ntu.edu.sg)
Эта статья есть
Оригинал